|
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР Машины землеройные СИДЕНЬЕ ОПЕРАТОРА. ГОСТ 27259-87 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ Москва ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
Срок действия с
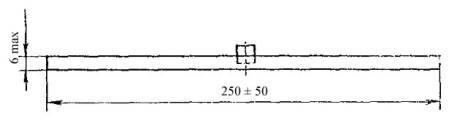
01.01.88 1. НАЗНАЧЕНИЕНастоящий стандарт устанавливает методы измерения и оценки, а также приемлемый уровень общей вибрации, передаваемой сиденьем телу оператора в процессе лабораторного моделирования вертикальной вибрации машины. 2. ОБЛАСТЬ ПРИМЕНЕНИЯСтандарт распространяется на сиденья, устанавливаемые на землеройные машины указанных в стандарте классов, каждый из которых представляет собой группу машин, сходных по вибрационным характеристикам (см. табл. 2). 3. ССЫЛКИ3.1. Ссылочные документы приведены в обязательном приложении. 4. ОБЩИЕ ПОЛОЖЕНИЯМоделируемая в лабораторных условиях вертикальная вибрация машины, которая устанавливается настоящим стандартом в качестве входного сигнала, подаваемого при испытаниях на сиденье оператора, получена на основании данных измерений вибрации машин, работающих в типичных тяжелых условиях эксплуатации. Входной испытательный сигнал для какого-либо класса машин представляет собой огибающую результатов, полученных для машин данного класса, поэтому режим лабораторных испытаний является более тяжелым, чем типичный вибрационный режим конкретной машины. Установленные настоящим стандартом требования к испытаниям, измерительной аппаратуре и методам оценки обеспечивают возможность проведения измерений и регистрации данных с приемлемой точностью. Оценку вибрации проводят в соответствии с требованиями ИСО 2631. Оценка включает методы взвешивания уровня вибрации при различных частотах для учета частотной чувствительности оператора. Примечание. Настоящий стандарт не устанавливает методов оценки вибрации, воспринимаемой ногами оператора, находящимися на платформе рабочего места или на педалях, или его руками, находящимися на рулевом колесе или рычагах управления. 5. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯТермины настоящего стандарта, в основном, соответствуют ИСО 2041. Дополнительные термины, применяемые в настоящем стандарте, определены ниже. 5.1. Общая вибрация - вибрация, передаваемая всему телу сидящего оператора. 5.2. Сиденье оператора - часть машины, предназначенная служить опорой для сидящего оператора, включающая и систему подвески сиденья. 5.3. Частотный анализ - определение амплитуды вибрации как функции частоты. 5.4. Период измерения - период времени, в течение которого получены записи вибрации для анализа. 6. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯа - мгновенное ускорение; at - среднее квадратическое значение ускорения в пределах третьоктавной полосы со среднегеометрической частотой f; аw - частотно-взвешенный сигнал ускорения; аwf - взвешенное среднее квадратическое ускорение, вычисленное по п.п. 7.4.1, 7.4.2 или 7.4.3 настоящего стандарта; аwfВ = аwf у основания сиденья (п. 7.2.2); аwfs = аwf на диске, помещенном на сиденье (п. 7.2.1); Ве - полоса частот разрешения при частотном анализе, Гц; f - частота; Т - продолжительность анализа, с; Wf - безразмерный весовой коэффициент, зависящий от частоты; g - ускорение свободного падения по международному соглашению принятое равным 9,80665 м/с2 на уровне моря; rms - среднее квадратическое значение; PSD - спектральная плотность, равная отношению среднего квадрата ускорения к ширине полосы пропускания фильтра, (м/с2)/Гц; PDF - плотность распределения амплитуд ускорения; SIP - контрольная точка сиденья (см. ИСО 5353). 7. АППАРАТУРАПриводимые технические требования к измерительным приборам и аппаратуре для анализа относятся к лабораторным испытаниям сиденья на вибростенде. Требования, отмеченные звездочками (*...*), введены с целью расширения технических требований для использования при полевых испытаниях машин. 7.1. Датчики ускоренийДля восприятия вибрации, передаваемой оператору, необходимо применять датчик ускорения (акселерометр), установленный на приспособлении по п. 7.2.1. Акселерометр и соединенный с ним усилитель должны быть пригодными для измерения средних квадратических уровней ускорения в диапазоне 0,1 - 10 м/с2 при значении амплитудного фактора не более 3. Акселерометр и усилитель, надлежащим образом откалиброванные для испытаний, должны обеспечивать измерения с погрешностью не более ±2,5 % фактического среднего квадратического уровня вибрации в диапазоне частот 0,8 - 40 Гц (*и не более ±6,0 % фактического среднего квадратического уровня вибрации в диапазоне частот 40-80 Гц*) при вычислении по техническим характеристикам аппаратуры с учетом фактических условий испытаний. Резонансная частота акселерометра должна быть выше 300 Гц. Акселерометр должен без повреждения выдерживать мгновенные уровни ускорения до 100 м/с2. Для измерения вибрации у основания сиденья необходимо применять акселерометр того же типа, имеющий такое же отношение сигнал/шум и удовлетворяющий вышеприведенным требованиям. 7.2. Установка датчика7.2.1. Вибрация, передаваемая оператору Акселерометр, воспринимающий вибрацию, передаваемую оператору, должен быть закреплен в середине тонкого диска диаметром (250±50) мм, помещенного между сидящим оператором и подушкой сиденья. Допускается использовать как жесткий, так и полужесткий диски, однако полужесткий диск рекомендуется главным образом для мягкой или облегающей подушки сиденья. Резонансная частота диска должна быть выше верхнего предела диапазона измеряемых частот. Конструкции дисков показаны на черт. 1 и 2. Диск помещают на сиденье таким образом, чтобы акселерометр располагался между седалищными буграми, и ось его была параллельна измерительной оси аz (черт. 3). Для сохранения позиции диска его фиксируют при помощи липкой ленты или другим аналогичным способом. Конструкция жесткого диска с прикрепленным в середине акселерометром в сборе
Черт. 1 Конструкция полужесткого диска из формированной резины (твердостью 80-90 по шкале A твердомера), пластмассы и т.д.
1 - углубление для акселерометра; 2 - тонкий металлический диск для установки акселерометра и увеличения жесткости средней части Черт. 2 7.2.2. Вибрация у основания сиденья Для измерения вибрации у основания сиденья акселерометр закрепляют к жесткому элементу конструкции испытательного стенда или основания сиденья. Акселерометр располагают в пределах вертикальной проекции подушки сиденья в точке, удаленном не более чем на 100 мм от вертикальной продольной плоскости, проходящей через центр сиденья, причем ось акселерометра должна быть параллельна измерительной оси az (черт. 3). Если испытательный вибростенд имеет рычажную конструкцию, подобно изображенной на черт. 5 (п. 8.1), то акселерометр для измерения вибрации у основания сиденья должен быть на таком же расстоянии от точки опоры рычага (с отклонением не более ±20 мм), что и акселерометр на диске, помещаемом на сиденье. 7.3. Электронный магнитографЭлектрические сигналы от датчиков можно регистрировать на магнитной ленте для последующего анализа. Откалиброванный для испытаний магнитограф должен обеспечивать воспроизведение с погрешностью не более ±3 % среднего квадратического значения общего сигнала в диапазоне частот 1-80 Гц при вычислении по техническим характеристикам аппаратуры с учетом фактических условий испытаний. Рекомендуется применять магнитографы, соответствующие требованиям действующих стандартов в части регулировочных характеристик и искажения сигнала. Измерительная ось Z направлена от ягодиц к голове
Черт. 3 7.4. Частотное взвешиваниеЧастотное взвешивание допускается осуществлять любым из трех способов: дискриминационным анализом ускорения при делении диапазона частот на фиксированные частоты, взвешивания уровней на отдельных частотах и рекомбинации; анализом уровней ускорения по третьоктавным полосам, взвешивания уровней в отдельных полосах и рекомбинации или же непосредственным применением электрических фильтров при широкополосном измерении сигнала. Ниже описаны все три метода в порядке уменьшения точности (имеется в виду точность, получаемая при практическом применении анализирующей аппаратуры). 7.4.1. Метод фиксированных частот Каждый вибрационный процесс в записи на магнитной ленте либо вибрационный сигнал, если магнитограф не применяется, делят на уровни ускорения, соответствующие фиксированным частотам в диапазоне 1-20 Гц (*до 80 Гц*) при помощи существующих методов дискриминации. Время выборки Т в секундах и разрешающая способность Ве в герцах должны удовлетворять следующим требованиям: 2ВеТ ≥ 140; Ве ≤ 0,3 Гц. Характеристика фильтра в режиме вертикальной вибрации Аг
Черт. 4 Средний квадрат показаний времени по цифровому преобразователю (временная область) следует сравнивать со средним квадратом спектральной оценки (частотная область). Если эти значения отличаются друг от друга, то следует пересмотреть методику измерений и исправить возможные ошибки, например неподходящий масштаб, неправильно выбранный поправочный коэффициент для данного временного окна или же ошибки программы. Средние квадратические значения уровней, соответствующие фиксированным частотам, умножают на весовые коэффициенты, рассчитанные для каждой среднегеометрической частоты вертикальной вибрации (черт. 4). Взвешенное значение ускорения аwf вычисляют как корень квадратный из суммы квадратов взвешенных уровней ускорения на фиксированных частотах в диапазоне 1-20 Гц (*до 80 Гц*). 7.4.2. Метод анализа по третьоктавным полосам частот Каждый вибрационный процесс в записи на магнитной ленте либо вибрационный сигнал, если магнитограф не применяется, разлагают на составляющие ускорения по третьоктавным полосам со среднегеометрическими частотами, указанными в табл. 1 (получены при помощи экстраполяции данных (МЭК 225)). Среднее квадратическое значение каждого составляющего ускорения аf усредняют за промежуток времени, выделенный для измерений. Значения для третьоктавных полос умножают на весовые коэффициенты Wf по табл. 1, после чего для каждой записи процесса вычисляют взвешенное ускорение аwf по формуле
Таблица 1 Весовые
частотные коэффициенты
Для того, чтобы выполнялось условие 2ВеT ≥ 140, минимальное время выборки должно составлять 300 с. 7.4.3. Метод измерения взвешенного уровня широкополосной вибрации Данный метод, если его применяют для непосредственного получения взвешенного уровня вибрации, предусматривает применение электронной взвешивающей схемы, встраиваемой между датчиком ускорения и блоком интегрирования по времени. Взвешивающая схема должна вносить уменьшение коэффициента передачи, соответствующее кривой черт. 4 для вертикальной вибрации az. Уменьшение коэффициента передачи не должно отличаться от этой кривой более чем на ±1 дБ для частотного диапазон. 1,1 - 10 Гц и более чем на ±2 дБ - для других частот. Блок интегрирования должен обеспечивать взятие интеграла от квадрата взвешенного ускорения аw с пределом интегрирования, равным времени испытательного пробега Т
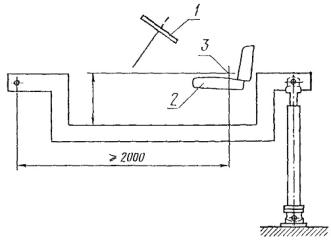
Минимальное время выборки Т 300 с. 7.5. Калибровка7.5.1. Общие положения Для ознакомления с рекомендуемыми правилами применения аппаратуры и мерами предосторожности следует изучать инструкции по эксплуатации и другую сопроводительную документацию, прилагаемую изготовителем приборов. Всю измерительно-анализирующую схему в целом следует подвергать регулярной калибровке, проводимой метрологами с соблюдением рекомендаций изготовителя по регулировке и применению отдельных составных частей оборудования. Датчики ускорения следует калибровать в соответствии с принятыми методами. В частности, метод калибровки должен обеспечивать проверку того, что чувствительность схемы к ускорению в зависимости от изменения изменяется меньше чем на ±2,5 % среднего значения в диапазоне частот 0-40 Гц и меньше чем на ±6,0 % среднего значения в диапазоне частот 0-80 Гц. Должно быть известно влияние окружающей температуры и влажности на характеристики всех приборов. Приборы должны работать в температурных пределах, обеспечивающих требуемую точность. 7.5.2. Подготовка аппаратуры к испытаниям Рекомендуется, чтобы отбор аппаратуры для фактических условий испытаний проводил персонал, имеющий специальную подготовку, и чтобы испытания вели только опытные специалисты, знакомые с современными методами измерения и анализа случайных вибраций. Многоприборные измерительные схемы следует проверять на соответствие уровней сигнала, оконечное сопротивление между зажимами и длину кабелей. Общую чувствительность измерительной схемы к ускорению следует проверять методом, основанным на применении наклоняемой опоры при статической калибровке датчиков ускорения. Отклонение измерительной оси датчика от вертикального положения на 180° обеспечивает изменение его выходного сигнала от одного крайнего значения до другого, соответствующее изменению входного сигнала ускорения на 19,61 м/с2 (2g). Измерительную ось акселерометра следует устанавливать вертикально и с поворотом на 180° с отклонениями не более чем на ±4°, а максимальное изменение выходного напряжения измерять с погрешностью не более ±0,5 %. Данную калибровку выполняют и регистрируют перед началом и после окончания каждой серии испытаний и повторяют с определенными интервалами в течение одной и той же серии, если она включает большое число испытаний. Результаты каждой такой калибровки сравнивают с данными внутренней электронной калибровки всей измерительной схемы. Датчик для измерения вибрации, передаваемой оператору, не обязательно снимать с установочного приспособления-диска (п. 7.2.1), если измерительную ось датчика можно располагать в нужном направлении с соблюдением предписанных допусков. Для описанного метода калибровки необходимо определять чувствительность измерительной схемы при нулевой частоте. Непосредственно перед началом и сразу после окончания каждого испытания проверяют внутреннюю электронную калибровку всей измерительной схемы и выполняют коррекцию, необходимую для сохранения требуемой точности измерений. Выходной сигнал от усилителя каждого акселерометра выводят на нуль с использованием соответствующих методов балансировки при установке акселерометров в испытательную позицию между сиденьем и сидящим оператором, а также на основании сиденья или испытательном стенде. Непосредственно перед началом и сразу после окончания каждого испытания регулируют нулевой сигнал на выходе всей измерительной схемы. 8. ВИБРОСТЕНД ДЛЯ ИСПЫТАНИЙ8.1. Физические характеристикиСтенд для испытаний должен, как минимум, иметь электрогидравлическую систему управления с обратной связью и степенью свободы в направлении az. Динамическая характеристика стенда должна обеспечивать возможность сообщения основанию занятого сиденья колебаний в соответствии с определенным испытательным спектром. Передаточные характеристики стенда могут быть компенсированы в процессе синтеза командного входного сигнала с целью удовлетворения выходных требований к спектральной плотности и плотности распределения амплитуд ускорений az у основания сиденья. Для получения командного сигнала, обеспечивающего на выходе спектральную плотность PSD и плотность распределения амплитуд ускорений PDF у основания сиденья, допускается использовать любой подходящий метод с применением цифровых или аналоговых устройств. Подвижная часть вибростенда должна содержать площадку, на которой размещаются основание стенда и плоская подставка для ног оператора. Стенд должен обеспечивать принудительное движение площадки строго в вертикальном направлении и быть свободным от резонансных явлений и нелинейностей, которые могли бы вызвать искажения выходного вибрационного процесса в степени, превышающей корректирующую способность системы компенсации сигнала. Схема вибростенда для испытаний сиденья оператора
1-типичная установка на машине; 2 - типичное расположение на машине; 3 - контрольная точка сиденья SIP Черт. 5 Бели площадка установлена на рычаге, как показано на черт. 5, расстояние от точки опоры рычага до контрольной точки сиденья (SIP) должно быть не менее 2000 мм. 8.2. Рекомендации по безопасности конструкцииЕсли ускорение у основания сиденья по какой-либо причине превысит 15 м/с2, испытательный вибростенд следует снабдить надежным устройством автоматической остановки. Желательно, чтобы это устройство было гидравлическим, например предохранительный клапан выключения подачи и (или) клапан ограничения нагрузки на поршень исполнительного цилиндра гидропривода стенда. Если в качестве чувствительного элемента устройства безопасности используется датчик ускорения, то его сигнал должен, проходить через низкочастотный фильтр с критической частотой 20 Гц во избежание автоматического отключения стенда в результате появления высокочастотных составляющих, лежащих за пределами возможностей гидропривода вибростенда. Если испытательный стенд снабжен приводом негидравлического типа, следует применять соответствующие устройства безопасности. Насос и (или) сервоклапаны следует подбирать таким образом, чтобы скорость стенда не превышала 1,3 м/с, аккумулятор должен иметь минимальные размеры, обеспечивающие требуемую характеристику системы. К оператору, занимающему испытуемое сиденье, а также к оператору, управляющему испытательным оборудованием, должны быть выведены аварийные выключатели, отсекающие энергопитание гидравлического контура и выключающие клапан разгрузки гидросистемы от давления. При всех испытаниях вибровозбуждение следует увеличивать медленно, чтобы иметь возможность прекратить испытания по просьбе оператора, занимающего сиденье. 8.3. Технические характеристикиТехнические характеристики приводятся для оказания помощи при выборе испытательного вибростенда. Максимальную толкающую силу вибратора рекомендуется выбирать в 1,5 раза большей, чем масса платформы, сиденья и испытуемого оператора. Диапазон рабочих частот - 0,5-20 Гц. Ход поршня - не менее 175 мм (плюс допуск для переменной составляющей при нулевой частоте вибрации). 9. ОБЪЕКТЫ ИСПЫТАНИЙ9.1. Испытуемые сиденьяИспытуемое сиденье оператора должно соответствовать серийно выпускаемым (или намечаемым к серийному выпуску) сиденьям по конструкции, статистическим и вибрационным характеристикам и другим свойствам, которые могут оказать влияние на результаты виброиспытаний. Высота установки сиденья над площадкой вибростенда должна соответствовать реальной установке на машине. Сиденья, имеющие подвеску, должны перед испытаниями пройти обкатку в условиях, указанных изготовителем. Если условия изготовителем не указаны, то продолжительность обкатки перед испытаниями должна составлять 5 ч. При этом на сиденье помещают груз массой 75 кг, например мешки со свинцовой дробью, и подают синусоидальный входной вибросигнал частотой, примерно соответствующей частоте собственных колебаний подвески, с амплитудой, вызывающей перемещение подвески на полный ход. В процессе обкатки необходимо следить за тем, чтобы не перегревался амортизатор подвески. Сиденье должно быть отрегулировано в соответствии с ростом и массой испытуемого оператора согласно инструкции изготовителя. 9.2. Испытуемые операторыК испытаниям привлекают двух испытуемых операторов: одного общей массой 55 кг (0 %; +10 %), из которых не более 5 кг могут приходиться на грузовой пояс, охватывающий талию; другого общей массой 98 кг (0 %; +10 %), из которых не более 8 кг могут приходиться на грузовой пояс. Испытуемый оператор должен сидеть на сиденье в естественной позе, поставив ступни ног на площадку и сложив руки на коленях. Если на площадке смоделировано рулевое колесо, его размещение должно соответствовать реальной установке на машине и руки оператора должны лежать на рулевом колесе в позиции, типичной дли работы на машине. Операторы должны пройти соответствующую тренировку для обеспечения пассивного поведения относительно сиденья в процессе всех испытаний. Примечание. Если нет возможности подобрать испытуемого оператора массой 98 кг, допускается привлекать к испытаниям оператора меньшей массы с использованием дополнительного груза массой не более 15 кг для обеспечения общей массы 98 кг (0 %; +10 %). Дополнительный груз следует распределять поровну между грузовым поясом и жилетом (или наплечными ремнями). Если результат испытаний по п. 11.3.4 для такого испытуемого окажется на границе приемлемого уровня по п. 1.2, то этот результат должен быть признан отрицательным. В протоколе испытаний должны быть приведены подробные сведения о применяемом дополнительном грузе. 10. ВХОДНОЙ ВИБРАЦИОННЫЙ СИГНАЛ10.1. Классы машинКлассы машин по вибрационным характеристикам приведены в табл. 2. В каждый класс входит широкий круг машин разных типоразмеров. Вибрационные характеристики по п. 10.2 являются огибающими, построенными на основании статистических данных для машин разных типоразмеров, входящих в определенный класс, что позволяет по результатам одного испытания сделать вывод о пригодности одного сиденья для использования на любой машине этого класса. Таблица 2 Классы машин
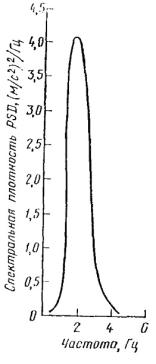
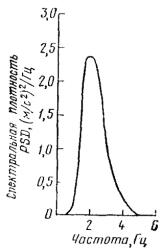
Примечание. По результатам будущих исследований в таблицу могут быть внесены дополнительные классы (например, автогрейдеры, экскаваторы-погрузчики). 10.2. Вибрационные характеристикиВибрационные характеристики для машин каждого класса приведены на черт. 6-9. Точные уравнения для всех кривых спектральной плотности ускорении, изображенных на черт. 6-9, приведены в табл. 3. Эти кривые, соответствующие упомянутым уравнениям, построены на основании заданных значений, которые нужно воспроизвести у основания сиденья при случайном вибронагружении во время испытании по п. 11.3. 10.2.1. Входные уровни вибрации при испытаниях и допустимые отклонения спектральной плотности фактически полученного испытательного вибросигнала у основания сиденья приведены в табл. 4. Класс 1, истинное среднее квадратическое ускорение 2,35 м/с2
Черт. 6 Класс 2, истинное среднее квадратическое ускорение 2,05 м/с2
Черт. 7 Класс 3, истинное среднее квадратическое ускорение 1,90 м/с2
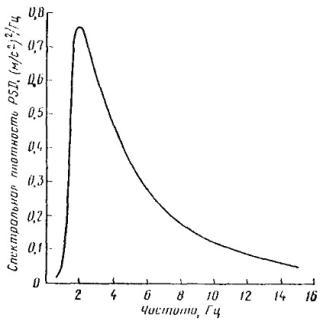
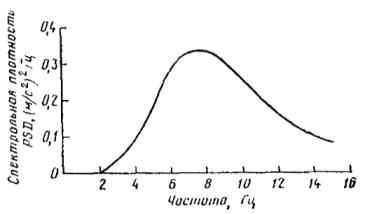
Черт. 8 Класс 4, истинное среднее квадратическое ускорение 1,60 м/с2
Черт. 9 Таблица 3
Примечание. Буквами HP и LP обозначены фильтра пропускания верхних и нижних частот (соответственно) конструкции Баттерворта. Цифровые индексы возле буквенных обозначений указывают падение характеристики фильтра в дБ/октава. Следовательно, таблица полностью определяет свойства полосовых фильтров как по частотам, так и по падению характеристик. 10.2.2. Для получения требуемых характеристик спектральной плотности PSD и средних квадратических значений ускорении у основания сиденья и процессе испытаний со случайным вибронагружением допускается использовать любые способы, в том числе применять двойные интеграторы, генераторы аналогового сигнала с фильтрами либо цифровые генераторы сигнала с аналого-цифровыми преобразователями. Формулы для кривых спектральной плотности PSD Класс 1: PSD = 5,30 (HP24)2 (LP24)2. Класс 2: PSD = 2,72 (HP24)2 (LP24)2. Класс 3: PSD = 1,11 (HP24)2 (LP6)2. Класс 4: PSD = 0,79 (HP12)2 (LP12)2. В вышеприведенных формулах
Fc - граничная частота фильтра, Гц. 10.2.3. В табл. 4 представлены плотности распределения, которым должны удовлетворять случайные вибросигналы у основания сиденья в процессе испытаний. Таблица 4 Уровни входного испытательного сигнала и допустимые отклонения
* Для анализа в соответствии с ограничениями времени выборки Т и ширины полосы пропускания Ве по п. 7.4.1. Примечания: 1. Для всех испытаний при условии, что в выборку ускорений у основания сиденья пойдут не менее 50 точек на каждую секунду реализации и что анализ будет проводиться с шагом амплитуд не более 50 % общего истинного среднего квадратического ускорения, плотность распределения не должна отличаться от теоретического нормального закона более чем на ±20 % на участке от минус 200 до плюс 200 % общего истинного среднего квадратического ускорения, причем не менее 93 % данных должно попадать на этот участок и не должно быть точек, выходящих за пределы участка от минус 400 до плюс 400 % общего истинного среднего квадратического ускорения. 2. В графе 2 представлены базовые значения истинных средних квадратических ускорений, определяемые при помощи кривых черт. 6-9 и формуле разд. 10. В графе 3 - заданные значения частотно-взвешенного среднего квадратического ускорения, которые следует получить при формировании входного вибросигнала, подаваемого на основание сиденья при испытаниях. В графе 4 - допустимые отклонения для значений, представленных в графе 3. В графе 5 приведены допустимые отклонения для кривой спектральной плотности PSD фактически полученного при испытаниях входного вибросигнала у основания сиденья. Здесь указан жесткий допуск ±1 дБ для кривой PSD в установленном диапазоне частот, охватывающем основную часть вибрационного процесса, и менее жесткий допуск ±2 дБ для кривой PSD в более широком диапазоне частот. В графе 6 приведено дополнительное требование - минимальная доля в процентах истинных средних квадратических ускорений фактически полученного при испытаниях вибросигнала, которые должны быть в пределах установленного диапазона частот. Частоты, указанные в графах 5 и 6, - границы полос. 11. ПОРЯДОК ИСПЫТАНИЙ11.1. Подготовка оборудованияИспытуемое сиденье должно быть смонтировано на испытательном вибростенде по разд. 8 в соответствии с требованиями к установке сиденья, изложенными в п. 9.1. Измерительные приборы и аппаратура должны быть размещены согласно требованиям разд. 7 и откалиброваны согласно требованиям п. 7.5. 11.2. Испытания по определению демпфирующей способности сиденьяНа сиденье помещают груз массой 75 кг, например свинцовую дробь. Допускается использовать два одинаковых по размеру мешка с дробью, снабженные приспособлениями для закрепления и симметрично размещаемые на подушке сиденья примерно в той же зоне, которую занимает сидящий оператор. 11.2.1. К основанию сиденья подают синусоидальный вибросигнал с полной амплитудой смещения 50 мм и частотой, соответствующей резонансной частоте подвески ±0,1 Гц. Если резонансная частота подвески превышает 2 Гц, то возбуждающий вибросигнал должен быть синусоидальным с полной амплитудой ускорения 7,9 м/с2. В процессе испытаний необходимо следить, чтобы не перегревался амортизатор подвески. 11.2.2. Испытания повторяют до получения трех последовательных результатов, в которых частотно-взвешенные средние квадратические значения ускорений (awf по п. 7.4), измеренные на диске по п. 7.2.1, отличаются не больше чем на ±5 % среднего арифметического. Это среднее арифметическое должно быть зарегистрировано. 11.2.3. Для трех зачетных результатов по п. 11.2.2 должно быть зарегистрировано среднее арифметическое трех частотно-взвешенных средних квадратических значений ускорений (awf по п. 7.4), измеренных у основания сиденья. 11.2.4. Для получения данных о частотно-взвешенных средних квадратических значениях ускорений по пп. 11.2.2 и 11.2.3 допускается использовать любой из методов, перечисленных в п. 7.4, при условии, что и для пп. 11.2.2 и 11.2.3 будет применен один и тот же метод. 11.2.5. Максимальным коэффициент передачи вибрации для данного сиденья рассчитывают как отношение зарегистрированных значений по пп. 11.2.2 и 11.2.3:
11.3. Испытание на вибрацию при случайном нагруженииИспытуемый оператор каждой весовой категории располагается на сиденье в положении по п. 9.2. Испытательный вибростенд должен работать в режиме, обеспечивающем подачу к основанию сиденья входного вибросигнала по разд. 10, соответствующего классу машины, для которой предназначено сиденье. Входной вибросигнал должен генерироваться непрерывно в течение промежутка времени, достаточного для получения при каждом испытании реализации длительностью не менее 5 мин. Перед началом и после окончания каждого испытания проводят балансировку и поверку аппаратуры по п. 7.5.2. 11.3.1. Для испытуемого оператора каждой весовой категории (см. п. 9.2) испытания повторяют до получения трех последовательных результатов, в которых частотно-взвешенные средние квадратические значения ускорений (awf по п. 7.4), измеренные на диске по п. 7.2.1, отличаются не более чем на ±5 % их среднего арифметического. Это среднее арифметическое регистрируют как awfs. 11.3.2. Для испытаний по п. 11.3.1 параметры вибрационного процесса у основания сиденья должны удовлетворять требованиям табл. 4. Для испытуемого оператора каждой весовой категории регистрируют ускорение awfВ, рассчитываемое как среднее арифметическое трех опытных частотно-взвешенных средних квадратических значений ускорения (awf по п. 7.4), измеренных у основания сиденья. 11.3.3. Для получения данных о частотно-взвешенных средних квадратических значениях ускорения по пп. 11.3.1 и 11.3.2 допускается использовать любой из методов, перечисленных в п. 7.4, при условии, что для пп. 11.3.1 и 11.3.2 будет применен один и тот же метод. 11.3.4. Частотно-взвешенное среднее квадратическое значение ускорения, передаваемого оператору awfS должно быть скорректировано в зависимости от того, насколько фактически достигнутое при испытаниях частотно-взвешенное среднее квадратическое значение входного ускорения awfВ отличается от значения, заданного в графе 3 табл. 4. Расчет выполняют по формуле скорректированное передаваемое оператору
12. ПРИЕМЛЕМЫЕ УРОВНИПри испытаниях по настоящему стандарту: 12.1. Максимальный коэффициент передачи вибрации сиденьем по п. 11.2.5 должен быть не более 2,0. 12.2. Скорректированное
частотно-взвешенное среднее квадратическое значение ускорения, передаваемое
оператору (скорректированное передаваемое оператору 13. ПРОТОКОЛ ИСПЫТАНИЙВ протокол испытаний следует включать данные: а) наименование и адрес предприятия-изготовителя сиденья; б) модель сиденья; в) дату проведения испытаний; г) продолжительность предварительной обкатки сиденья, ч; д) тип используемого датчика (полужесткий, жесткий); е) высоту контрольной точки сиденья SIP над площадкой стенда при испытаниях; ж) номер класса машины; з) максимальный коэффициент передачи вибрации сиденьем (значение коэффициента с указанием частоты, при которой проведены измерения); и) вибрацию, передаваемую оператору: массу оператора, кг; вибрацию оператора (взвешенное среднее квадратическое значение), м/с2; к) испытания проводил... ПРИЛОЖЕНИЕОбязательное ССЫЛОЧНЫЕ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





|
Раздел, пункт, в котором приведена ссылка |
Обозначение соответствующего стандарта |
Обозначение отечественного нормативно-технического документа, на который дана ссылка |
|
ИСО 2631 |
- |
|
|
Разд. 5 |
ИСО 2041 |
- |
|
Разд. 6 |
ИСО 5353 |
- |
|
МЭК 225 |
- |
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ВНЕСЕН Министерством строительного, дорожного и коммунального машиностроения СССР
2. Постановлением Государственного комитета СССР по стандартам от 30.03.87 № 1037 введен в действие государственный стандарт СССР ГОСТ 27259-87, в качестве которого непосредственно применен международный стандарт ИСО 7096-82, с 01.01.88
СОДЕРЖАНИЕ