| Введен в действие Приказом Ростехрегулирования от 4 марта 2008 г. N 31-ст МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ ВИБРАЦИЯ ВЕНТИЛЯТОРЫ ПРОМЫШЛЕННЫЕ ТРЕБОВАНИЯ К ПРОИЗВОДИМОЙ ВИБРАЦИИ И КАЧЕСТВУ БАЛАНСИРОВКИ Vibration.
Industrial fans. Requirements for vibration
levels and balance quality ISO 14694:2003 Industrial fans.
Specifications for balance
quality and vibration levels (MOD) ГОСТ 31350-2007 (ИСО 14694:2003) Группа Т34 Предисловие Цели, основные принципы и основной
порядок проведения работ по межгосударственной стандартизации установлены ГОСТ
1.0-92 "Межгосударственная система стандартизации. Основные
положения" и ГОСТ 1.2-97 "Межгосударственная система стандартизации.
Стандарты межгосударственные, правила и рекомендации по межгосударственной
стандартизации. Порядок разработки, принятия, применения, обновления и
отмены". Сведения о
стандарте 1. Подготовлен Открытым акционерным
обществом "Научно-исследовательский центр контроля и диагностики
технических систем" на основе собственного аутентичного перевода
стандарта, указанного в пункте 4. 2. Внесен Межгосударственным техническим
комитетом по стандартизации МТК 183 "Вибрация и удар". 3. Принят Межгосударственным советом по
стандартизации, метрологии и сертификации (Протокол N 32 от 24 октября 2007
г.). За принятие проголосовали: ┌────────────────────┬───────────────────┬────────────────────────────────┐ │Краткое наименование│ Код страны по │ Сокращенное наименование │ │ страны по │МК (ИСО 3166)004-97│ национального органа │ │МК (ИСО 3166)004-97 │ │ по стандартизации │ ├────────────────────┼───────────────────┼────────────────────────────────┤ │Азербайджан │ AZ │Азстандарт │ │Армения │ AM │Минторгэкономразвития │ │Беларусь │ BY │Госстандарт Республики Беларусь │ │Казахстан │ KZ │Госстандарт Республики │ │ │ │Казахстан │ │Кыргызстан │ KG │Кыргызстандарт │ │Молдова │ MD │Молдова-Стандарт │ │Российская Федерация│ RU │Федеральное агентство │ │ │ │по техническому регулированию │ │ │ │и метрологии │ │Таджикистан │ TJ │Таджикстандарт │ │Узбекистан │ UZ │Узстандарт │ └────────────────────┴───────────────────┴────────────────────────────────┘ 4. Настоящий стандарт является
модифицированным по отношению к международному стандарту ИСО 14694:2003
"Вентиляторы промышленные. Требования к производимой вибрации и качеству
балансировки" (ISO 14694:2003 "Industrial fans - Specifications for
balance quality and vibration levels") путем изменения содержания
положений, объяснение которого приведено во введении к настоящему стандарту, и
изменения его структуры. Наименование настоящего стандарта
изменено относительно наименования указанного международного стандарта с целью
приведения к единому виду для комплекса стандартов по вибрации. Сравнение структуры настоящего стандарта
со структурой указанного международного стандарта приведено в дополнительном
Приложении J. Международный стандарт разработан ИСО/ТК
117 "Вентиляторы промышленные". Перевод с английского языка (en).
Официальные экземпляры международных стандартов, на основе которых подготовлен
настоящий межгосударственный стандарт и на которые даны ссылки, имеются в
Федеральном информационном фонде технических регламентов и стандартов. Степень соответствия - модифицированная
(MOD). 5. Приказом Федерального агентства по
техническому регулированию и метрологии от 4 марта 2008 г. N 31-ст
межгосударственный стандарт ГОСТ 31350-2007 (ИСО 14694:2003) введен в действие
в качестве национального стандарта Российской Федерации с 1 июля 2008 г. 6. Взамен ГОСТ 5976-90 и ГОСТ 11442-90 в
части предельных значений вибрации и допустимых значений дисбалансов. Информация о введении в действие
(прекращении действия) настоящего
стандарта публикуется в указателе "Национальные стандарты". Информация об изменениях к настоящему
стандарту публикуется в указателе "Национальные стандарты", а текст
изменений - в информационных указателях "Национальные стандарты". В
случае пересмотра или отмены настоящего стандарта соответствующая информация
будет опубликована в информационном указателе "Национальные
стандарты". Введение Вибрация, производимая вентилятором,
является одной из его важнейших технических характеристик. Она позволяет судить
о качестве конструирования и изготовления изделия. Повышенная вибрация может
свидетельствовать о неправильной установке вентилятора, ухудшении его
технического состояния и т.п. По этой причине вибрацию вентилятора
обычно измеряют в процессе приемосдаточных испытаний, при установке перед
пуском в эксплуатацию, а также при выполнении программы мониторинга
технического состояния машин. Данные о вибрации вентилятора используют также
при проектировании его опоры и подсоединенных систем (воздухопроводов). В целях настоящего стандарта
предполагают, что измерения вибрации проводят с открытыми всасывающим и
нагнетательным отверстиями, однако необходимо иметь в виду, что вибрация
вентилятора может существенно изменяться при изменении аэродинамики воздушного
потока, частоты вращения и других характеристик. Настоящий стандарт следует применять
совместно с ГОСТ ИСО 10816-1-97, ГОСТ ИСО 10816-3-2002 и ГОСТ 31351-2007, в
которых установлены методы измерений и определены местоположения датчиков
вибрации. Если измерения вибрации проводят для оценки ее воздействия на
воздуховод или основание вентилятора, точки измерений выбирают соответствующим
образом. Приведенная в настоящем стандарте
классификация по допустимым значениям дисбаланса и вибрации применима к серийно
выпускаемым вентиляторам. Измерения вибрации вентилятора могут быть
дорогостоящими, и иногда их стоимость значительно превышает стоимость
изготовления самого изделия. Поэтому какие-либо ограничения на значения
отдельных дискретных составляющих вибрации или параметров вибрации в полосах
частот следует вводить только в случаях, когда превышение этих значений
свидетельствует о неисправности вентилятора. Число точек измерения вибрации
также следует ограничить исходя из предполагаемого использования результатов
измерений. Обычно для оценки вибрационного состояния
вентилятора достаточно проводить измерения вибрации на его опорах. По сравнению с примененным международным
стандартом ИСО 14694:2003 в текст настоящего стандарта внесены следующие
изменения: - поскольку в раздел 3 международного
стандарта включено большое число общеупотребительных терминов в области
балансировки, в определении которых не отражена специфика их применения для
продукции данного класса, а также имеются неточности и ошибки, оставлены только
термины, которые не включены в терминологические стандарты ГОСТ 19534-74 и ГОСТ
24346-80. Соответственно в данном разделе приведены ссылки на указанные
межгосударственные стандарты; - в раздел 2 добавлены ГОСТ 19534-74 и
ГОСТ 24346-80, а международные стандарты, не введенные на данный момент в
качестве межгосударственных, перенесены в структурный элемент
"Библиография"; - из таблиц 4 и 5 исключены предельные
значения для пиковых значений виброскорости, которые не представляют собой
дополнительный критерий, а получены пересчетом среднеквадратичного значения в
пиковое значение для случая синусоидальной вибрации. Предельные пиковые
значения приведены в международном стандарте потому, что установление
ограничений для этих значений является общепринятой практикой в некоторых
странах. Соответственно изменены заголовки граф таблиц 4 и 5; - исключено приложение D, содержащее
качественное описание вибрации вентилятора как результата отклика
массово-пружинной системы с одной степенью свободы, которое не позволяет
получить практически значимые результаты. Соответственно изменена нумерация
остальных приложений (см. Приложение J); - в Приложении E рисунок E.1,
заимствованный из старой редакции ИСО 1940-1:1986, заменен соответствующим
рисунком из новой редакции ИСО 1940-1:2003; - в примере 1 Приложения E значения
корректирующих масс рассчитаны не через допустимое значение эксцентриситета
центра масс - из структурного элемента
"Библиография" исключены международные стандарты, на которые
отсутствуют ссылки в тексте настоящего стандарта. 1. Область
применения Настоящий стандарт устанавливает
предельные значения вибрации и допустимые значения дисбалансов для промышленных
вентиляторов всех видов (далее - вентиляторы), кроме бытовых вентиляторов,
предназначенных исключительно для создания воздушных потоков в помещении
(например, потолочных или настольных). Установленные предельные значения
распространяются на вентиляторы мощностью двигателя менее 300 кВт. Рекомендации
для вентиляторов большей мощности даны в ГОСТ ИСО 10816-3. Параметры, для которых установлены
предельные значения, зависят от целей измерений вибрации (см. раздел 5). Положения настоящего стандарта могут быть
использованы для формулировки требований в договорных отношениях сторон. Примечание. Испытания в заводских
условиях обычно проводят для вентиляторов с открытым входом и выходом (без
системы трубопроводов), поэтому их аэродинамическая характеристика существенно
отличается от имеющей место в нормальных условиях эксплуатации. Кроме того,
отличаться могут также масса и жесткость временного основания, на который
устанавливают вентилятор. Поэтому для испытаний в заводских условиях предельные
значения применяют к узкополосной вибрации в области частоты вращения, а для
испытаний на месте установки вентиляторов - к широкополосной вибрации,
определяющей общее вибрационное состояние машины. Настоящий стандарт распространяется на
вентиляционное оборудование с жесткими роторами, используемыми, например, в
системах обогрева, вентиляции и кондиционирования воздуха, в различных
технологических процессах, для шахтной/туннельной вентиляции и в энергетических
установках. Настоящий стандарт не распространяется на
установки, работающие в условиях действия больших сил, ударов или экстремальных
температур. Настоящий стандарт не распространяется на
требования к качеству установки вентиляционного оборудования. Обычно
изготовитель не несет ответственности за конструкцию основания и правильность
установки вентилятора. Предполагают, что при установке потребитель обеспечит
требуемую опору и условия стабильной работы вентилятора, при которых его
вибрация будет удовлетворять тем же критериям, что и при заводских испытаниях. Настоящий стандарт не устанавливает
требований к вибрации, передаваемой вентилятором в присоединенные конструкции. 2. Нормативные
ссылки В настоящем стандарте использованы
нормативные ссылки на следующие стандарты: ГОСТ ИСО 1940-1-2007. Вибрация.
Требования к качеству балансировки жестких роторов. Часть 1. Определение
допустимого дисбаланса ГОСТ ИСО 5348-2002. Вибрация и удар.
Механическое крепление акселерометров ГОСТ ИСО 7919-1-2002. Вибрация. Контроль
состояния машин по результатам измерений вибрации на вращающихся валах. Общие
требования ГОСТ ИСО 10816-1-97. Вибрация. Контроль
состояния машин по результатам измерений вибрации на невращающихся частях.
Часть 1. Общие требования ГОСТ ИСО 10816-3-2002. Вибрация. Контроль
состояния машин по результатам измерений вибрации на невращающихся частях.
Часть 3. Промышленные машины номинальной мощностью более 15 кВт и номинальной
скоростью от 120 до 15000 ГОСТ 10921-90. Вентиляторы радиальные и
осевые. Методы аэродинамических испытаний ГОСТ 19534-74. Балансировка вращающихся
тел. Термины ГОСТ 24346-80. Вибрация. Термины и
определения ГОСТ 31322-2006 (ИСО 8821:1989).
Вибрация. Требования к балансировке элементов ротора, собираемых с помощью шпонки ГОСТ 31351-2007 (ИСО 14695:2003).
Вибрация. Вентиляторы промышленные. Измерения вибрации. Примечание. При пользовании настоящим
стандартом целесообразно проверить действие ссылочных стандартов на территории
государства по соответствующему указателю стандартов, составленному по
состоянию на 1 января текущего года, и по соответствующим информационным
указателям, опубликованным в текущем году. Если ссылочный стандарт заменен
(изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим
(измененным) стандартом. Если ссылочный стандарт отменен без замены, то
положение, в котором дана ссылка на него, применяют в части, не затрагивающей
эту ссылку. 3. Термины и
определения В настоящем стандарте применены термины
по ГОСТ 19534 и ГОСТ 24346, а также следующие термины с соответствующими
определениями: 3.1. Вибрационное состояние: значение или
совокупность значений параметров, характеризующих вибрацию машины. 3.2. Категория вентилятора (по
назначению): элемент описательной классификации, используемой для
характеристики назначения вентиляторов, классов точности их балансировки и
рекомендуемых предельных значений параметров вибрации. 3.3. Механические биения: изменение
расстояния от поверхности вала до некоторой фиксированной точки (измерительного
устройства) при проворачивании вала. 3.4. Электрические биения: источник
(электромагнитной природы) погрешности измерений биений ротора с использованием
датчиков вибрации бесконтактного типа. Примечания. 1. Такие погрешности могут
быть следствием остаточного магнетизма ротора, неоднородности электрических
свойств его поверхности, а также других факторов, оказывающих влияние на
калибровку датчика вибрации. 2. Изменения положения поверхности вала,
изготовленного из ферромагнитного материала, определяют в процессе его
медленного проворачивания с использованием бесконтактных датчиков вихретокового
типа. На результат измерений помимо изменений формы поверхности вала может
оказать влияние различие электромагнитных свойств разных участков вала. 3.5. Место эксплуатации: место
окончательной установки вентилятора, для которого определены условия его
работы. 3.6. Основание: конструкция,
поддерживающая механическую систему. Примечания. 1. Эта конструкция может быть
жестко заделана в некоторый специальный каркас или совершать движения,
передаваемые на опору вентилятора. 2. Основание - это то, к чему крепится
вентилятор и что составляет необходимую вентилятору опору. Массу и жесткость
основания выбирают таким образом, чтобы препятствовать усилению передаваемой
через него вибрации. 3.7. Податливая опора: система опоры
вентилятора, сконструированная таким образом, чтобы первая собственная частота
опоры лежала значительно ниже рабочей частоты вращения вентилятора. Примечание. При определении степени
податливости опоры следует учитывать упругие вставки между вентилятором и
опорной конструкцией. Податливость опоры обеспечивают, вывешивая вентилятор на
пружинах или устанавливая опору на упругие элементы (пружины, резиновые
изоляторы и т.д.). Частота собственных колебаний системы "подвеска -
вентилятор" обычно составляет менее 25% частоты, соответствующей
минимальной скорости вращения испытуемого вентилятора. 3.8. Жесткая опора: система опоры
вентилятора, сконструированная таким образом, чтобы первая собственная частота
опоры лежала значительно выше рабочей частоты вращения. Примечание. Жесткость основания
вентилятора относительна. Ее необходимо рассматривать в сопоставлении с
жесткостью подшипников машины. Отношение вибрации корпуса подшипника к вибрации
основания представляет собой характеристику, определяющую влияние податливости
основания. Основание можно считать жестким и достаточно массивным, если
амплитуда вибрации основания (в любом направлении) вблизи лап или опорной рамы
машины составляет менее 25% максимального значения результата измерений
вибрации, выполненных на ближайшей подшипниковой опоре (в любом направлении). 4. Обозначения В настоящем стандарте применены следующие
обозначения величин. Обозначение Величина Единица измерений a мгновенное виброускорение (ускорение) м/с2 a опорное значение виброускорения м/с2 0 A пиковое значение виброускорения м/с2 peak A среднеквадратичное значение (с.к.з.) м/с2 r.m.s. виброускорения A уровень с.к.з. виброускорения относительно дБ dB
опорного значения d мгновенное виброперемещение (перемещение) мкм, мм или м
f частота, G класс точности балансировки - m масса ротора кг n, N рабочая частота вращения ротора t время с T период вибрации с
v мгновенная виброскорость (скорость) мкм/с, мм/с или м/с
опорного значения
5. Назначение
испытаний Перед проведением вибрационных испытаний
любых видов необходимо определить и согласовать между заинтересованными
сторонами назначение этих испытаний и результаты, которые должны быть получены. Наиболее типичными задачами испытаний
являются: a) оценка качества конструкции
вентилятора; b) оценка качества изготовления
вентилятора на стадии его приемки (см. 8.3); c) проверка правильности выбора опоры и
соединения воздуховода на месте эксплуатации путем сравнений с результатами
заводских испытаний (см. Приложение D); d) контроль вибрационного состояния машин
для получения базовой линии вибрации и информации о тенденции ее изменения (см.
Приложение F); e) предоставление конструктору
механических систем, связанных с вентилятором (опор, основания, воздуховода и
т.д.), данных о вибрации, которая будет передана на эти системы. Полученные результаты могут быть
представлены в виде общего уровня вибрации в широкой полосе частот, в октавных,
третьоктавных или узких полосах частот (дискретных составляющих). Общий объем
получаемых данных зависит от категории вентилятора (см. раздел 6) и целей
проведения испытаний. 6. Категории
вентиляторов (BV-категории) Конструкция вентилятора и его назначение
являются критериями, позволяющими классифицировать вентиляторы многих типов по
допустимым значениям дисбаланса и уровням вибрации (BV-категориям). В таблице 1 представлены категории, к
которым могут быть отнесены вентиляторы исходя из условий их применения с
учетом допустимых значений дисбалансов и уровней вибрации. Категорию
вентилятора определяет изготовитель. Таблица 1 Категории вентиляторов ┌──────────────────┬───────────────────────────────┬─────────┬────────────┐ │Условия применения│ Примеры │Потреб- │BV-категория│ │ │ │ляемая │ │ │ │ │мощность,│ │ │ │ │кВт │ │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Бытовые и офисные│ Потолочные и чердачные венти- │ <= 0,15 │ BV-1 │ │помещения │ляторы, оконные кондиционеры │ > 0,15 │ BV-2 │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Здания и сельско-│ Вентиляторы для проветривания │ <= 3,7 │ BV-2 │ │хозяйственные │помещений и в системах кондици-│ > 3,7 │ BV-3 │ │помещения │онирования воздуха, вентиляторы│ │ │ │ │в серийном оборудовании │ │ │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Технологические │ Вентиляторы в закрытых │ <= 300 │ BV-3 │ │процессы и произ- │помещениях, шахтах, конвейерах,│ > 300 │ см. ГОСТ │ │водство энергии │котлах, аэродинамических │ │ИСО 10816-3 │ │ │трубах, в системе газоочистки │ │ │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Транспорт, в том │ Вентиляторы на локомотивах, │ <= 15 │ BV-3 │ │числе морские суда│грузовых и легковых автомобилях│ > 15 │ BV-4 │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Туннели │ Вентиляторы для проветривания │ <= 75 │ BV-3 │ │ │метро, туннелей, гаражей │ > 75 │ BV-4 │ │ │ │ Любая │ BV-4 │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Нефтехимическое │ Вентиляторы для удаления │ <= 37 │ BV-3 │ │производство │опасных газов, а также │ > 37 │ BV-4 │ │ │используемые в других │ │ │ │ │технологических процессах │ │ │ ├──────────────────┼───────────────────────────────┼─────────┼────────────┤ │ Производство │ Вентиляторы для создания │ Любая │ BV-5 │ │компьютерных чипов│чистых помещений │ │ │ ├──────────────────┴───────────────────────────────┴─────────┴────────────┤ │ Примечания. 1. Настоящий стандарт рассматривает только вентиляторы│ │мощностью менее 300 кВт. Оценка вибрации вентиляторов большей мощности -│ │по ГОСТ ИСО 10816-3. Однако серийные стандартные электродвигатели могут│ │иметь номинальную мощность до 355 кВт. Вентиляторы с такими│ │электродвигателями следует принимать в соответствии с настоящим│ │стандартом. │ │ 2. Таблица 1 не распространяется на легкие низкоскоростные│ │вентиляторы большого диаметра (обычно от 2800 до 12500 мм) с осевым│ │потоком, используемые в теплообменниках, башенных охладителях и т.п.│ │Класс точности балансировки для таких вентиляторов должен быть G16, а│ │категория вентиляторов - BV-3. │ └─────────────────────────────────────────────────────────────────────────┘ В случае приобретения отдельных элементов
ротора (колеса или крыльчатки) для их последующей установки на вентилятор
следует руководствоваться классом точности балансировки данных элементов (см.
таблицу 2), а в случае приобретения вентилятора в сборе помимо этого следует
принимать во внимание результаты заводских испытаний на вибрацию (таблица 4) и
вибрацию на месте эксплуатации (таблица 5). Обычно указанные характеристики
согласованы между собой, поэтому выбор вентилятора можно осуществлять на основе
его BV-категории. Установленная в таблице 1 классификация
является типичной для нормального применения вентиляторов, однако в
обоснованных случаях заказчик может запросить вентилятор другой BV-категории.
Рекомендуется указывать BV-категорию вентилятора, класс точности балансировки и
допустимые уровни вибрации в договоре на поставку оборудования. Отдельное соглашение между заказчиком и
изготовителем может быть заключено в отношении условий установки вентилятора,
чтобы при заводских испытаниях вентилятора в сборе были учтены планируемые
условия установки на месте эксплуатации. При отсутствии такого соглашения
ограничения на тип основания (жесткое или податливое) для заводских испытаний
не устанавливают. 7. Балансировка 7.1. Общие положения Изготовитель вентиляторов несет
ответственность за проведение балансировки вентиляторов согласно
соответствующему нормативному документу. Настоящий стандарт основан на
требованиях ГОСТ ИСО 1940-1. Балансировку проводят обычно на
высокочувствительных, специально сконструированных балансировочных станках,
позволяющих получить точную оценку остаточного дисбаланса. 7.2. Классы точности балансировки Для колес вентиляторов применяют классы
точности балансировки в соответствии с таблицей 2. Изготовитель вентиляторов
может проводить балансировку сразу для нескольких элементов в сборе, куда кроме
колеса могут входить вал, соединительная муфта, шкив и т.д. Помимо этого
балансировки могут потребовать отдельные элементы сборки (см. [1] и [2] в
отношении балансировки шкивов и муфт соответственно). Таблица 2 Классы точности балансировки
7.3. Расчет допустимого остаточного
дисбаланса Класс G, указанный в таблице 2, является
классом точности балансировки, числовое значение для которого, в мм/с, получено
умножением допустимого остаточного дисбаланса Таким образом
В большинстве случаев допустимый
остаточный дисбаланс в каждой из двух плоскостей коррекции можно рассматривать
равным Измерения и расчет остаточного дисбаланса
проводят по ГОСТ ИСО 1940-1. 8. Вибрация
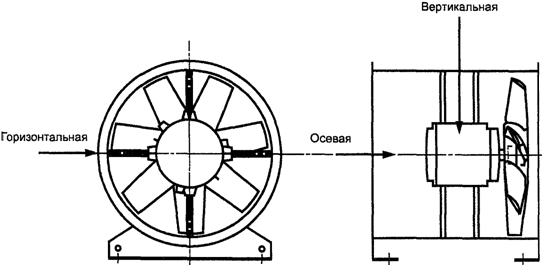
вентиляторов 8.1. Требования к проведению измерений 8.1.1. Общие положения На рисунках 1 - 4 показаны некоторые
возможные точки и направления измерений на каждом подшипнике вентилятора.
Значения, приведенные в таблице 4, относятся к измерениям в направлении,
перпендикулярном к оси вращения. Число и местоположение точек измерений как для
заводских испытаний, так и для измерений на месте эксплуатации определяют по
усмотрению изготовителя вентиляторов или по соглашению с заказчиком.
Рекомендуется проводить измерения на подшипниках вала колеса вентилятора
(крыльчатки). Если это невозможно, датчик следует установить в таком месте, где
обеспечена максимально короткая механическая связь между ним и подшипником.
Датчик не следует закреплять на безопорных панелях, корпусе вентилятора,
элементах ограждения или других местах, не имеющих прямой связи с подшипником
(результаты таких измерений могут быть использованы, но не для оценки
вибрационного состояния вентилятора, а для получения информации о вибрации,
передаваемой к воздуховоду или на основание, - см. ГОСТ 31351 и ГОСТ ИСО 5348.
Рисунок 1. Расположение трехкоординатного датчика для горизонтально установленного осевого
вентилятора
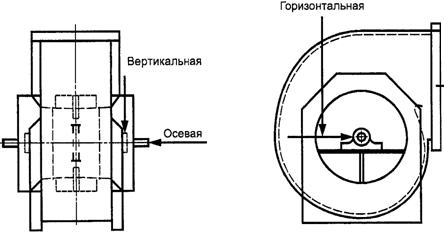
Рисунок 2. Расположение трехкоординатного датчика для радиального вентилятора одностороннего
всасывания
Рисунок 3. Расположение трехкоординатного датчика для радиального вентилятора двустороннего
всасывания
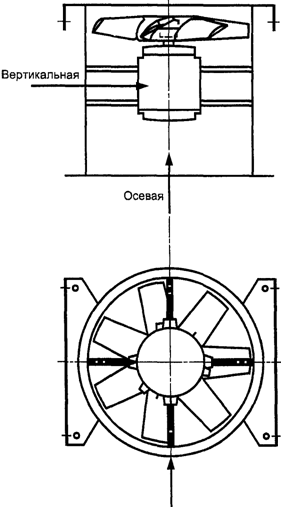
Рисунок 4. Расположение трехкоординатного датчика для вертикально установленного осевого
вентилятора Измерения в горизонтальном направлении
следует проводить под прямым углом к оси вала. Измерения в вертикальном
направлении должны быть проведены под прямым углом к горизонтальному
направлению измерений и под прямым углом к валу вентилятора. Измерения в продольном
направлении следует проводить в направлении, параллельном оси вала. 8.1.2. Измерения с использованием
датчиков инерционного типа Все значения вибрации, указанные в
настоящем стандарте, относятся к измерениям, выполненным с помощью датчиков
инерционного типа, сигнал которых воспроизводит движение корпуса подшипника. Применяемые датчики могут быть либо
акселерометрами, либо датчиками скорости. Особое внимание следует уделить
правильному креплению датчиков: без зазоров по опорной площадке, качаний и резонансов.
Размер и масса датчиков и системы крепления не должны быть чрезмерно большими,
чтобы не вносить существенных изменений в измеренную вибрацию. Суммарная
погрешность, обусловленная способом крепления датчика вибрации и калибровкой
измерительного тракта, не должна превышать +/- 10% значения измеряемой
величины. 8.1.3. Измерения с использованием
датчиков бесконтактного типа По соглашению между пользователем и
изготовителем могут быть установлены требования к предельным значениям
перемещения вала (см. ГОСТ ИСО 7919-1) внутри подшипников скольжения.
Соответствующие измерения могут быть проведены с помощью датчиков
бесконтактного типа. В этом случае измерительная система
определяет перемещение поверхности вала относительно корпуса подшипника.
Очевидно, что допустимая амплитуда перемещений не должна превышать значения
зазора в подшипнике. Значение внутреннего зазора зависит от размера и типа
подшипника, нагрузки (радиальной или осевой), направления измерений (отдельные
конструкции подшипников имеют отверстие эллиптического типа, для которого зазор
в горизонтальном направлении больше, чем в вертикальном). Многообразие
факторов, которые следует принимать во внимание, не позволяет установить единые
предельные значения перемещения вала, однако некоторые рекомендации
представлены в виде таблицы 3. Значения, приведенные в этой таблице,
представляют собой процентное отношение к общему значению радиального зазора в
подшипнике в каждом направлении. Таблица 3 Предельное относительное перемещение вала внутри подшипника
Приведенные значения даны с учетом
"ложных" перемещений поверхности вала. Эти "ложные"
перемещения появляются в результатах измерений вследствие того, что на эти
результаты влияют помимо вибрации вала также его механические биения, если вал
погнут или имеет некруглую форму. При использовании датчика бесконтактного типа
вклад в результат измерений дадут также электрические биения, определяемые
магнитными и электрическими свойствами материала вала в точке измерений.
Считают, что при пуске вентилятора в эксплуатацию и его последующей нормальной
работе размах суммы механических и электрических биений в точке измерений не
должен превышать большего из двух значений: 0,0125 мм или 25% измеренного
значения перемещения. Биения определяют в процессе медленного проворачивания
вала (на скорости от 25 до 400 Приведенные предельные значения применимы
только для вентилятора, работающего в номинальном режиме. Если конструкция
вентилятора предусматривает его работу от привода с переменной скоростью
вращения, то на других скоростях возможны более высокие уровни вибрации
вследствие неизбежного влияния резонансов. Если в вентиляторе предусмотрена
возможность изменения положения лопастей относительно потока воздуха у входного
отверстия, приведенные значения следует применять для условий работы с
максимально открытыми лопастями. Следует учесть, что срыв воздушного потока,
особенно заметный при больших углах раскрытия лопасти относительно входного
воздушного потока, может приводить к повышенным уровням вибрации. Вентиляторы, устанавливаемые по схемам B
и D (см. ГОСТ 10921), следует испытывать с всасывающими и (или) нагнетательными
воздуховодами, длина которых превышает их диаметр не менее чем в два раза (см.
также Приложение C). Пример - Рекомендуемые значения для
подшипника скольжения диаметром 150 мм с внутренним зазором в горизонтальном
направлении 0,33 мм: Предельная вибрация вала (относительно
подшипниковой опоры): - пуск/удовлетворительное состояние: (0,25 x 0,33 мм) = 0,0825 мм (размах); - уровень предупреждения: (0,50 x 0,33 мм) = 0,165 мм (размах); - уровень останова: (0,70 x 0,33 мм) = 0,231 мм (размах). Сумма механического и электрического
биений вала в точке измерений вибрации: a) 0,0125 мм; b) 0,25 x 0,0825 мм = 0,0206 мм. Большее из двух значений составляет
0,0206 мм. 8.2. Система опоры вентилятора Вибрационное состояние вентиляторов после
их установки определяют с учетом жесткости опоры. Опору считают жесткой, если
первая собственная частота системы "вентилятор - опора" превышает
скорость вращения. Обычно при установке на бетонные фундаменты больших размеров
опору можно считать жесткой, а при установке на виброизоляторы - податливой.
Стальная рама, на которую часто устанавливают вентиляторы, может относиться к
любому из двух указанных типов опоры. В случае сомнений в отношении типа опоры
вентилятора можно выполнить расчеты или провести испытания для определения
первой собственной частоты системы. В некоторых случаях опору вентилятора
следует рассматривать как жесткую в одном направлении и податливую в другом. 8.3. Пределы допустимой вибрации
вентиляторов при испытаниях в заводских условиях Предельные уровни вибрации, приведенные в
таблице 4, применяют к вентиляторам в сборе. Они относятся к измерениям
виброскорости в узкой полосе частот на опорах подшипников для частоты вращения,
применяемой при испытаниях в заводских условиях. Таблица 4 Предельные значения вибрации при испытаниях в заводских условиях
8.4. Пределы допустимой вибрации
вентиляторов при испытаниях на месте эксплуатации Вибрация любого вентилятора на месте
эксплуатации зависит не только от качества его балансировки. Влияние будут
оказывать, например, факторы, связанные с установкой, такие как масса и
жесткость системы опоры. Поэтому изготовитель вентиляторов, если только это не
оговорено контрактом, не несет ответственности за уровень вибрации вентилятора
на месте его эксплуатации. В таблице 5 приведены рекомендуемые
предельные значения (в единицах виброскорости для широкополосной вибрации на
корпусах подшипников) при нормальной работе вентиляторов различных категорий. Таблица 5 Предельные значения вибрации на месте
эксплуатации
Вибрация новых принимаемых в эксплуатацию
вентиляторов не должна превышать уровень "пуск в эксплуатацию". По
мере эксплуатации вентилятора следует ожидать повышения уровня его вибрации
вследствие процессов износа и кумулятивного эффекта влияющих факторов. Такое
повышение вибрации является, в общем, закономерным и не должно вызывать
тревоги, пока не достигнет уровня "предупреждение". По достижении вибрацией уровня
"предупреждение" необходимо исследовать причины повышения вибрации и
определить меры по ее снижению. Работа вентилятора в таком состоянии должна
быть под постоянным наблюдением и ограничена временем, требуемым для
определения мер по устранению причин повышенной вибрации. Если уровень вибрации достигает уровня
"останов", меры по устранению причин повышенной вибрации должны быть
приняты незамедлительно, в противном случае вентилятор должен быть остановлен.
Задержка с приведением уровня вибрации к допустимому уровню может повлечь за
собой повреждение подшипников, появление трещин в роторе и в местах сварки
корпуса вентилятора и, в конечном итоге, разрушение вентилятора. При оценке вибрационного состояния
вентилятора следует контролировать изменения уровня вибрации со временем. Внезапное
изменение уровня вибрации свидетельствует о необходимости немедленного осмотра
вентилятора и принятия мер по его техническому обслуживанию. При контроле
изменения вибрации не следует принимать во внимание переходные процессы,
вызванные, например, заменой смазки или процедурами технического обслуживания. 9. Влияние
процедуры сборки Помимо колес в состав вентиляторов входят
другие вращающиеся элементы, которые могут оказать влияние на уровень вибрации
вентилятора: приводные шкивы, ремни, соединительные муфты, роторы
электродвигателей или других устройств привода. Если условия заказа требуют
поставку вентилятора без устройства привода, то изготовителю из практических
соображений может быть нецелесообразно проводить испытания всей сборки для
определения уровней вибрации. В таком случае даже при условии выполнения
изготовителем балансировки колеса вентилятора нет уверенности в том, что работа
вентилятора в сборе будет плавной до тех пор, пока вал вентилятора не будет
соединен с приводом и вся машина не будет испытана на вибрацию при пуске
вентилятора в эксплуатацию. Обычно после сборки требуется проведение
дополнительной балансировки, чтобы уменьшить уровень вибрации до приемлемого
уровня. Для всех новых вентиляторов категорий BV-3, BV-4 и BV-5 перед их
принятием в эксплуатацию рекомендуется провести измерения вибрации для машины в
сборе. Это позволит определить базовую линию и наметить дальнейшие меры по
техническому обслуживанию. Изготовители вентиляторов не несут
ответственности за влияние на вибрацию частей привода, установленных после
проведения испытаний в заводских условиях. 10. Средства
измерений и калибровка 10.1. Средства измерений Используемые средства измерений и
балансировочные станки должны быть поверены и удовлетворять требованиям
поставленной задачи. Период между поверками определяется рекомендациями
изготовителя средств измерений (испытаний). Состояние средств измерений должно
обеспечивать их нормальную работу в течение всего периода испытаний. Персонал, работающий со средствами
измерений, должен обладать достаточными навыками и опытом, позволяющими
выявлять возможные неисправности и ухудшения качества работы средств измерений. 10.2. Калибровка Все средства измерений должны быть
калиброваны в соответствии со стандартами. Сложность процедуры калибровки может
варьироваться от простого физического осмотра до калибровки всей системы в
целом. Корректирующие массы, используемые для определения остаточного
дисбаланса по ГОСТ ИСО 1940-1, могут быть применены также для калибровки
средств измерений. 11. Документация 11.1. Балансировка По запросу, если это предусмотрено
условиями договора, заказчику может быть предоставлен акт об испытаниях
вентилятора на качество балансировки, в который рекомендуется включать
следующую информацию: - наименование изготовителя
балансировочного станка, номер модели; - вид установки ротора: межопорный или консольный; - метод балансировки: статическая или
динамическая; - масса вращающихся частей ротора в
сборе; - остаточный дисбаланс в каждой плоскости
коррекции; - допустимый остаточный дисбаланс в
каждой плоскости коррекции; - класс точности балансировки; - критерии приемки: принят/отбракован; - сертификат балансировки (при
необходимости). 11.2. Вибрация По запросу, если это предусмотрено
условиями договора, заказчику может быть предоставлен акт об испытаниях на
вибрацию вентилятора, в который рекомендуется включать следующую информацию: - использованные средства измерений; - способ крепления датчика вибрации; - эксплуатационные параметры вентилятора
(расход воздуха, давление, мощность); - частота вращения вентилятора; - тип опоры: жесткая или податливая; - измеряемая вибрация: 1) положение датчиков вибрации и
измерительных осей, 2) единицы измерений и опорные уровни
вибрации, 3) диапазон частот измерений (узкая или
широкая полоса частот); - допустимый уровень (уровни) вибрации; - измеренный уровень (уровни) вибрации; - критерии приемки: принят/отбракован; - сертификат об уровнях вибрации (при
необходимости). 11.3. Протокол испытаний На рисунке 5 показан пример протокола
испытаний вентилятора на вибрацию и качество балансировки. Форма протокола
испытаний может иметь другой вид при условии, что в него включена информация в
соответствии с 11.1 и (или) 11.2. ПРОТОКОЛ ИСПЫТАНИЙ НА ВИБРАЦИЮ И КАЧЕСТВО БАЛАНСИРОВКИ ВЕНТИЛЯТОРА ┌─────────┐ ┌─────────┐ Заказ на проведение работ N ├─────────┤ Заказ на поставку N ├─────────┤ Тип вентилятора ├─────────┤ Покупатель ├─────────┤ Описание ├─────────┤ Серийный номер ├─────────┤ Рисунок N ├─────────┤ Спецификация ├─────────┤ Диаметр колеса ├─────────┤ ├─────────┤ │ -1 │ │ │ Скорость вращения │ мин │ │ │ ├─────────┤ ├─────────┤ Потребляемая электроэнергия │В фи Гц │ │ │ └─────────┘ └─────────┘ Настоящим подтверждается, что указанный образец имеет допустимый остаточный дисбаланс G по ГОСТ ИСО 1940-1-2007 и удовлетворяет требованиям ГОСТ 31350-2007 и ГОСТ 31351-2007. Положение датчиков вибрации - см. схему ┌──────────────┐ │ БАЛАНСИРОВКА │ Полоса фильтра _____________ Гц └──────────────┘ ┌──────┬───────────────────────────┬─────────────────────────┬────────────┐ │ │ │ -1 │ │ │Датчик│ Скорость, с.к.з. ┌─────┐│ Частота мин ┌─────┐│Класс │ │ │ мм/с └─────┘│ └─────┘│точности │ │ │ пик ┌─────┐│ вращения Гц ┌─────┐│балансировки│ │ │ └─────┘│ └─────┘│ │ ├──────┼───────────────────────────┼─────────────────────────┼────────────┤ │ А │ │ │ │ ├──────┼───────────────────────────┼─────────────────────────┼────────────┤ │ В │ │ │ │ └──────┴───────────────────────────┴─────────────────────────┴────────────┘ Для преобразования с.к.з. в размах умножить на 1,414. Для преобразования с.к.з. в пиковое значение умножить на 0,707. Для получения
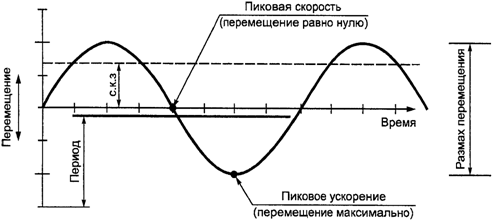
пикового значения перемещения, в мм: Схема ┌─┬─┬─┬─┬─┬─┐ ├─┼─┼─┼─┼─┼─┤ ├─┼─┼─┼─┼─┼─┤ ├─┼─┼─┼─┼─┼─┤ ├─┼─┼─┼─┼─┼─┤ ├─┼─┼─┼─┼─┼─┤ └─┴─┴─┴─┴─┴─┘ ┌──────────────┐ │ ВИБРАЦИЯ │ └──────────────┘ ┌─────────────┬────────────────────────────────┐ │ Режим │ Датчики │ │ ├───────┬───────┬───────┬────────┤ │ │1 │2 │3 │4 │ ├─────────────┼───────┼───────┼───────┼────────┤ ├─────────────┼───────┼───────┼───────┼────────┤ ├─────────────┼───────┼───────┼───────┼────────┤ └─────────────┴───────┴───────┴───────┴────────┘ Измеряемый параметр вибрации: перемещение/скорость/ускорение Единица измерений: мкм (размах) мм/с (с.к.з.) м/с2 (с.к.з.) мм/с (пик) м/с2 (пик) -9 -6 Опорное значение скорости: 10 м/с Опорное значение ускорения: 10 м/с2 ┌──────────────────────┐ │Установка вентилятора │ Свободная ┌─┐ Упругие ┌─┐ Пружины ┌─┐ Подвеска ┌─┐ └──────────────────────┘ └─┘ опоры └─┘ └─┘ └─┘ ┌───────────────────────────┐ ┌──────────────────────┐ │Оборудование │ Датчики ├──────────────────────┤ └───────────────────────────┘ Анализатор └──────────────────────┘ Испытания провел: Организация: Дата: Рисунок 5. Типичная форма протокола испытаний на вибрацию и качество балансировки Приложение A (справочное) СООТНОШЕНИЕ МЕЖДУ ПЕРЕМЕЩЕНИЕМ, СКОРОСТЬЮ И УСКОРЕНИЕМ ДЛЯ СИНУСОИДАЛЬНОЙ ВИБРАЦИИ Для широкополосной вибрации простого
соотношения между параметрами ускорения, скорости и перемещения не существует.
Однако в случаях, когда вибрация машины, например из-за значительного
дисбаланса ротора, сосредоточена на одной частоте (см. рисунок A.1) или
пропущена через узкополосный фильтр, имеют место следующие соотношения, не
зависящие от выбранных единиц измерений:
Рисунок A.1 Примеры 1. В случае, если на частоте вращения
1800
2. В случае, если на частоте вращения
1800
Приложение B (рекомендуемое) СПОСОБЫ БАЛАНСИРОВКИ НА БАЛАНСИРОВОЧНОМ СТАНКЕ B.1. Вентилятор с прямым приводом B.1.1. Общие положения Колесо вентилятора, которое при сборке
устанавливают непосредственно на вал электродвигателя, должно быть уравновешено
в соответствии с тем же правилом учета влияния шпонки, что и для вала
электродвигателя. Электродвигатели прошедших лет выпуска
могли быть уравновешены в процессе балансировки с полной шпонкой. В настоящее
время вал электродвигателя уравновешивают с полушпонкой, как это предписано
ГОСТ 31322, и маркируют меткой H (см. ГОСТ 31322). B.1.2. Электродвигатели, уравновешенные с
полной шпонкой Колесо вентилятора, насаживаемое на вал
электродвигателя, который уравновешен с использованием полной шпонки, следует
уравновешивать без шпонки на оправке конической формы. B.1.3. Электродвигатели, уравновешенные с
полушпонкой Для колеса вентилятора, насаживаемого на
вал электродвигателя, который был уравновешен с использованием полушпонки,
возможны следующие варианты: a) если колесо имеет стальную втулку,
нарезать в ней шпоночную канавку после проведения процедуры балансировки; b) проводить балансировку на оправке
конической формы с вставленной в шпоночную канавку полушпонкой; c) проводить балансировку на оправке,
имеющей одну или несколько шпоночных канавок (см. B.3), с использованием полных
шпонок. B.2. Вентиляторы с приводом от другого
вала Где возможно, все вращающиеся элементы,
включая вал вентилятора и шкив, следует уравновешивать как единое целое. Если
это нецелесообразно с практической точки зрения, балансировку следует проводить
на оправке (см. B.3) с использованием того же правила учета шпонки, что и для
вала. B.3. Оправка Оправка, на которую устанавливают колесо
вентилятора при балансировке, должна удовлетворять следующим требованиям: a) быть по возможности более легкой; b) быть в уравновешенном состоянии, что
обеспечивают соответствующим техническим обслуживанием и регулярным контролем; c) предпочтительно иметь коническую
форму, что позволит уменьшить погрешности, связанные с эксцентриситетом,
который появляется как результат допусков на размеры отверстия втулки колеса и
оправки. Если оправка имеет коническую форму, то при расчетах дисбаланса
следует учитывать истинное положение плоскостей коррекции относительно
подшипников. При необходимости использовать оправку
цилиндрической формы, в ней должна быть прорезана шпоночная канавка, в которую
вставлена полная шпонка для передачи вращающего момента от оправки к колесу
вентилятора. Другим вариантом является прорезание двух
шпоночных канавок на противоположных концах диаметра вала, что позволит
использовать метод балансировки, называемый реверсным. Этот метод заключается в
следующем. Сначала измеряют дисбаланс колеса, вставив в одну шпоночную канавку
полную шпонку, а в другую - полушпонку. Затем колесо поворачивают на 180°
относительно оправки и вновь измеряют его дисбаланс. Разность в полученных двух
значениях дисбаланса обусловлена остаточным дисбалансом оправки и
универсального соединения привода. Для получения истинного значения дисбаланса
ротора надо взять половину разности результатов этих двух измерений. Приложение C (справочное) ИСТОЧНИКИ ВИБРАЦИИ C.1. Общие положения Внутри вентилятора действует много
источников вибрации, и вибрация на некоторых частотах может быть прямо
сопоставлена с конкретными особенностями конструкции машины. В настоящем
приложении рассмотрены только самые общие источники вибрации, наблюдаемые для
большинства типов вентиляторов. Общим правилом является то, что любые
ослабления в креплении системы опоры вызывают ухудшение вибрационного состояния
вентилятора. Некоторая справочная информация о причинах повышенной вибрации
приведена в таблице C.1. Таблица C.1 Условные (от 1 до 10) вероятности частот, направлений и мест проявления дефекта ┌──────────────────────┬─────────────────────────────────────────────────────────────────┬─────────────────────────────────────────────┐ │ Причина
повышенной │ Характерные частоты │ Места и направления повышенной вибрации │ │
вибрации │
├────────────────┬────────────────────────────┤ │ │
│ Направление │ Часть машины │ │ ├─────┬─────┬──────┬────┬─────┬────┬───────┬───────┬────┬────┬────┼────┬─────┬─────┼───┬────┬────┬───┬────┬─────┤ │ │0 - │40% -│50% - │f │2f
│Выс-│1/2f │1/4f │Низ-│Не- │Вы- │По- │Вер-
│Про- │Вал│Под-│Кор-│Ос-│Тру-│Сое- │ │ │ 40%│
50%│ 100%│ rpm│ rpm│шие │ rpm│ rpm│шие │чет-│со- │пе-
│ти- │доль-│ро-│шип-│пус
│но-│бо- │дини-│ │ │ │
│ │ │
│гар-│ │ │суб-│ные │кие │реч-│каль-│ное │то-│ники│ │ва-│про-│тель-│ │ │ │
│ │ │ │мо- │ │ │гар-│гар-│час-│ное
│ное │ │ра │ │
│ние│вод-│ный │ │ │ │
│ │ │
│ники│ │ │мо- │мо- │тоты│ │
│ │ │
│ │ │ная │эле- │ │ │ │ │
│ │ │
│ │ │ники│ники│ │
│ │ │
│ │ │
│об- │мент │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │вяз-│ │ │
│ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │ка
│ │ ├──────┬───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Дисба-│ Начальный │
│ │ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
9 │ 1 │ │
│ │ │ │ланс │баланс │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │ │
│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Приобретенный │ │ │ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
9 │ 1 │ │
│ │ │ │ │дисбаланс │ │
│ │ │
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │(изгиб
вала) │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Несо- │ Дефект │ │
│ │ 4 │
5 │ 1 │
│ │ │
│ │ 3 │
2 │ 5 │
8 │ 1 │ 1 │
│ │ │ │оснос-│сопряжения │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ти, │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ослаб-│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ления,│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │дефор-├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │мации │ Ослабление │
│ │ │
│ 8 │ 1
│ │ │ │ 1
│ │ 5 │
4 │ 1 │ │ 3
│ 2 │ 2 │
2 │ 1 │ │ │в
соединении │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Изменение │ 1 │ 8 │ 1 │ │
│ │ │ │ │
│ │ 5 │
4 │ 1 │
7 │ 1 │ 1 │
│ │ 1 │ │ │геометрии │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │зазора │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Деформация │ │
2 │ │ 5
│ 2 │
│ │ │ │ 1
│ │ 5 │
4 │ 4 │
3 │ 1 │ 1 │ 1 │ │
│ │ │основания │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┴─────┴──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Деформация │ 1 │ │ 1/2 │1/2 │ │ │ │ 5
│ 4 │ 1 │
9 │ 1 │ │
│ │ │
│ │ │ │корпуса │ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┬─────┬──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Износ │ 1 │ 1 │ │ 2
│ 1 │ 1
│ │ │ 1 │ 1
│ 1 │ 4 │
3 │ 3 │
8 │ 1 │ 1 │
│ │ │ │ │уплотнений │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┴─────┴──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Осевой износ │ 2 │ 3 │
1 │ 1 │
│ │ 1 │ 1
│ 1 │ 4 │
3 │ 3 │
7 │ 1 │ 2 │
│ │ │ │ │ротора │ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┬─────┬──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Нагрузка на │ │
│ │ 4 │
5 │ 1 │
│ │ │
│ │ 3 │
2 │ 5 │
8 │ 1 │ 1 │
│ │ │ │ │трубопровод │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Под- │
Эксцентриситет│ │ │ │ 8
│ 2 │
│ │ │ │
│ │ 5 │
4 │ 1 │
9 │ 1 │ │
│ │ │ │шипни-│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ки и │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │цапфы ├───────────────┼─────┼─────┴──────┴────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Повреждения │ 1 │ 4
│ 2 │
│ │ │ │
│ 3 │ 4 │
3 │ 3 │
7 │ 2 │ 1 │
│ │ │ │ │радиальных │
│ │ │
│ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │подшипников │
│ │ │
│ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┬──────┬────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Повреждения │ 9 │ │ │
│ │ │ │ │ │
│ 1 │ 3 │
2 │ 5 │
6 │ 2 │ 2 │
│ │ │ │ │упорных │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │подшипников │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┴─────┴──────┴────┴─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Геометрия │ 10 │ │ │ │ │
│ │ 5 │
4 │ 1 │
5 │ 2 │ 2 │ 2 │ │
│ │ │подшипников │ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┬─────┬──────┬────┬─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Неизотропность│ │ │ │
│ 9 │ 1
│ │ │ │
│ │ 5 │
4 │ 1 │
4 │ 3 │ 3 │
│ │ │ │ │подшипников │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Зубча-│ Дефекты зуб- │
│ │ │
│ │ 2 │
│ │ │ 2 │ 6
│ 5 │ 3 │ 2 │
8 │ 1 │ 1 │
│ │ │ │тые │чатых
передач │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │пере- │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │дачи, │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │соеди-│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │нения │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Дефекты │ │
│ │ │
1 │ 8 │
1 │ │ │
│ │ 4 │
3 │ 3 │
7 │ 2 │ │
│ │ 1 │ │ │соединений │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Крити-│ Ротор │ │
│ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
6 │ 4 │ │
│ │ │ │ческие│(жесткие │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ско- │подшипники) │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │рости ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Система │ │
│ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
7 │ 3 │ │
│ │ │ │ │"ротор
- │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │подшипники" │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Соединения │ │
│ │ 10 │ │
│ │ │ │
│ │ 4 │
2 │ 4 │
1 │ 1 │ │
│ │ 8 │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │ Консольная │
│ │ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
7 │ 1 │ │
│ │ 2 │ │ │часть │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │ │
│ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Резо- │ Резонанс │ │
│ │ 10 │ │
│ │ │ │
│ │ 4 │
4 │ 2 │
2 │ 1 │ 2 │ 3 │ 2 │
│ │нансы │на основной │
│ │ │
│ │ │ │ │ │
│ │
│ │ │
│ │ │
│ │ │ │ │частоте │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┴───────┴────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Резонанс на │ │
│ │ │
│ │ 10 │ │
│ 3 │ 3 │ 4 │
2 │ 2 │ 2 │ 2 │ 2 │
│ │ │субгармонике │
│ │ │
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├───────────────┼─────┼─────┼──────┼────┼─────┴────┴───────┬───────┬────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Резонанс │ │
│ │ │ 10 │ │ │
│ │ 4 │
4 │ 2 │
2 │ 1 │ 1 │ 2 │ 3 │
│ │ │на
гармонике │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┬────┬───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Резонанс │ │
│ │ 8 │
1 │ │
1 │ │ │
│ │ 5 │
4 │ 1 │ │ 4
│ 4 │ 1 │
1 │ │ │ │корпуса │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Резонанс │ │
│ │ 8 │
1 │ │
1 │ │ │
│ │ 5 │
4 │ 1 │ │ 2
│ 5 │ 2 │
1 │ │ │ │опоры │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Резонанс │ │
│ │ 8 │
1 │ │
1 │ │ │
│ │ 4 │
3 │ 3 │ │ 1
│ 4 │ 4 │
1 │ │ │ │основания │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┴─────┴─────┼───┼────┼────┼───┼────┼─────┤ │ │
Резонанс │ │
│ │ 4 │
2 │ 2 │
│ │ │ 2
│ │ Угловое
│ 1 │ 4 │
4 │ │
│ 1 │ │ │угловых │ │
│ │ │
│ │ │ │ │
│ │ │ │
│ │ │
│ │ │ │колебаний │
│ │ │
│ │ │ │ │ │
│ │ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┴─────┴────┼───────┼───────┼────┼────┼────┼────┬─────┬─────┼───┼────┼────┼───┼────┼─────┤ │Причи-│ Дефекты │ │
│ │ 10
│ │ │ │
│ │ 4 │
3 │ 3 │
5 │ 3 │ │ 2 │ │
│ │ны │ремней │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │разной│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │приро-├───────────────┼─────┼─────┼──────┼────┬─────┬────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ды │
Возвратно- │ │
│ │ 3 │
5 │ 2 │
│ │ │
│ │ 3 │
6 │ 1 │
5 │ 3 │ 1 │ 1 │ │
│ │ │поступательное
│ │ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │движение │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Аэро-, гидро- │ │ │ │ 2
│ │ 6 │
│ │ │
│ 2 │ 5 │
4 │ 1 │
4 │ 3 │ 2 │ 1 │ │
│ │ │динамические │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │силы │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Гистерезисный │ 8 │
1 │ 1 │ │
│ │ │ │ │
│ │ 5 │
4 │ 1 │
8 │ 2 │ │
│ │ │ │ │вихрь │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Вихри в слое │ │ 10
│ │ │
│ │ │ │ │
│ │ 5 │
4 │ 1 │
8 │ 2 │ │ │
│ │ │ │масла │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Срыв потока │ │ 10
│ │ │
│ │ │ │ │
│ │ 5 │
4 │ 1 │
2 │ 2 │ 2 │ 2 │ 2 │
│ │ │воздуха │ │
│ │ │
│ │ │ │ │
│ │
│ │ │
│ │ │
│ │ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Обратный │ │
│ │ │
│ │ │ │ │
│ 10 │ 4 │ 3 │ 3 │
4 │ 2 │ 2 │ 1 │ │
1 │ │ │(сухой)
вихрь │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ ├──────┼───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │Вибра-│ Некруглость │
│ │ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
9 │ 1 │ │
│ │ │ │ция │ротора │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │элект-│
│ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ричес-├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │кого │
Несоосность │ │
│ │ 10 │ │
│ │ │ │
│ │ 4 │
3 │ 3 │
8 │ 2 │ │
│ │ │ │проис-│ротора и │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │ │
│ │ │
│ │хожде-│статора │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ния ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Эллиптичность │ │ │ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
8 │ 2 │ │
│ │ │ │ │зазора
статора │ │ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Дефект плас- │ │
│ │ 10 │ │
│ │ │ │
│ │ 5 │
4 │ 1 │
9 │ 1 │ │
│ │ │ │ │тин
коллектора │ │ │
│ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Изгиб вала │ │
│ │ 10 │ │
│ │ │ │
│ │ 3 │
2 │ 5 │
9 │ 1 │ │
│ │ │ │ │ротора │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │ │
│ │ ├───────────────┼─────┼─────┼──────┼────┼─────┼────┼───────┼───────┼────┼────┼────┼────┼─────┼─────┼───┼────┼────┼───┼────┼─────┤ │ │
Расцентровка │ │
│ │ 10 │ │
│ │ │ │
│ │ 3 │
2 │ 5 │
6 │ 4 │ │
│ │ │ │ │ротора
относи- │ │ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ │ │тельно
магнит- │ │ │ │
│ │ │ │ │ │
│ │
│ │ │
│ │ │
│ │ │ │ │ного
поля │ │
│ │ │
│ │ │ │ │
│ │ │
│ │ │
│ │ │
│ │ └──────┴───────────────┴─────┴─────┴──────┴────┴─────┴────┴───────┴───────┴────┴────┴────┴────┴─────┴─────┴───┴────┴────┴───┴────┴─────┘ Продолжение таблицы C.1 ┌──────────────────────┬─────┬──────────────────────────────────────────────┬──────────────────────────────────────┐ │ Причина
повышенной │Фаза │ Сопутствующий шум <*> │ Примечания │ │
вибрации │ │ │ │ │ │ │ │ │ │ │ ├─────┬─────┬────┬────┬─────┬───┬──────┬───────┤ │ │ │ │"Гро-│Гром-│"Гу-│Бие-│"Вой"│Вы-│"Визг"│Ультра-│ │ │ │ │мыха-│кий │де- │ния │ │со-│ │звук │ │ │ │ │ние" │"гул"│ние"│ │
│кий│ │ │ │ │ │ │
│ │ │
│ │тон│ │ │ │ │ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │ │ │ │
│ │ │
│ │ │
│ │ │ │ │ │ │
│ │ │
│ │ │ │ │ ├──────┬───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Дисба-│ Начальный │Ста- │ │
8 │ 2 │ │
│ │ │ │ Наиболее частая причина
вибрации, │ │ланс │баланс │биль-│ │
│ │ │
│ │ │ │амплитуда которой
пропорциональна │ │ │ │ная │
│ │ │
│ │ │
│ │значению
дисбаланса. Может проявляться│ │ │ │ │
│ │ │
│ │ │
│ │на фоне или
быть причиной других │ │ │ │ │
│ │ │
│ │ │
│ │дефектов,
таких как износ уплотнений, │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤дефекты
подшипников, резонансы. │ │ │
Приобретенный │Ста- │ │ 8 │
2 │ │
│ │ │ │Для роторов с развитой
консольной │ │ │дисбаланс │биль-│ │
│ │ │
│ │ │ │частью может быть
относительно │ │ │(изгиб
вала) │ная │
│ │ │
│ │ │
│ │высока
вибрация в продольном │ │ │ │
│ │ │
│ │ │
│ │ │(осевом) направлении │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Несо- │ Дефект │Ста- │ │
4 │ 4 │ 2
│ │ │
│ │ Следствием
несоосности является │ │оснос-│сопряжения │биль-│ │
│ │ │
│ │ │ │значительная осевая
вибрация. │ │ти, │ │ная │
│ │ │
│ │ │ │ │Для подтверждения диагноза
можно │ │ослаб-│ │ │
│ │ │
│ │ │
│ │использовать
микрометр. Может вызывать│ │ления,│ │ │
│ │ │
│ │ │
│ │значительные
силы трения и изгибные │ │дефор-├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤напряжения. │ │мации │ Ослабление │Ста- │ 8 │ 1 │
1 │ │
│ │ │ │ Ослабления в соединениях - │ │ │в
соединении │биль-│ │
│ │ │
│ │ │ │даже небольшие - могут
привести │ │ │ │ная │
│ │ │
│ │ │
│ │к
существенному усилению вибрации. │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤Обычно
сопровождаются дисбалансами │ │ │
Изменение │Ска- │ 6 │ 2 │ │ 2
│ │ │
│ │и дефектами
сопряжения. │ │ │геометрии │чущая│ │ │
│ │ │
│ │ │ Деформации не служат
непосредственной│ │ │зазора │ │
│ │ │
│ │ │
│ │причиной
вибрации, но вызывают │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤дефекты
сопряжений, что приводит │ │ │
Деформация │Ска- │ 1 │ 5 │
3 │ 1 │
│ │ │ │к внутреннему износу
поверхностей │ │ │основания │чущая│ │
│ │ │
│ │ │ │или неравномерному контакту │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤в
подшипниках. │ │ │
Деформация │Ска- │ 1 │ 7 │
1 │ 1 │
│ │ │ │ Силы, действующие на трубопровод, │ │ │корпуса │чущая│ │
│ │ │
│ │ │ │так же, как и деформация
основания, │ │ │ │ │
│ │ │
│ │ │
│ │часто
являются причинами резонансных │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤явлений. │ │ │
Износ │Ска- │ 2 │ 5 │ │ 1
│ │ 1 │ 1 │ │ Трение частей машины часто │ │ │уплотнений │чущая│ │
│ │ │
│ │ │ │характеризуется присутствием
большого │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤числа
составляющих во всем диапазоне │ │ │
Осевой износ │Ска- │ 3 │ 5 │ │ 2
│ │ │
│ │частот вплоть
до области ультразвука. │ │ │ротора │чущая│ │
│ │ │
│ │ │ │Является причиной появления
"пятен │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤износа",
что, в свою очередь, │ │ │
Нагрузка на │Ста- │ 3 │ 3 │
3 │ │
│ │ 1 │ │вызывает такие дефекты, как
изгиб │ │ │трубопровод │биль-│ │
│ │ │
│ │ │ │вала, кавитация в
подшипниках │ │ │ │ная │
│ │ │
│ │ │
│ │и
резонансы │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Под- │
Эксцентриситет│Ста- │ │ 1 │
9 │ │
│ │ │ │ Повреждения подшипников
качения │ │шипни-│ │биль-│ │
│ │ │
│ │ │ │сопровождаются
высокочастотной │ │ки и │ │ная
│ │ │
│ │ │
│ │ │вибрацией на характерных
частотах. │ │цапфы ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤
Эксцентриситет цапф вызовет │ │ │
Повреждения │Ска- │ 2 │ 4 │
1 │ │
1 │ 1 │ │ │максимальный эффект, если
они │ │ │радиальных │чущая│ │
│ │ │
│ │ │ │находятся на одной оси с
зубчатыми │ │ │подшипников │
│ │ │
│ │ │
│ │ │колесами. │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤
Вибрация от электродвигателей │ │ │
Повреждения │Ска- │ 8 │ 1 │
1 │ │
│ │ │ │и генераторов исчезает при
отключении │ │ │упорных │чущая│ │
│ │ │
│ │ │ │напряжения. Для насосов и
воздуходувок│ │ │подшипников │
│ │ │
│ │ │
│ │ │вибрационное состояние может быть │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤улучшено
балансировкой. │ │ │
Геометрия │Ска- │ 6 │ 1 │ │
3 │ │ │
│ │ Анализ
повреждений подшипников │ │ │подшипников │чущая│ │
│ │ │
│ │ │ │качения рекомендуется
осуществлять │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤по
результатам измерений виброскорости│ │ │
Неизотропность│Изме-│ │
1 │ 6 │ 2
│ 1 │
│ │ │ │ │ │подшипников │няю- │ │
│ │ │
│ │ │ │ │ │ │ │щаяся│ │
│ │ │
│ │
│ │ │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Зубча-│ Дефекты зуб- │Ска- │ 2 │ 1 │
1 │ 2 │
2 │ 1 │ │
1 │ Основная причина
повреждений │ │тые │чатых
передач │чущая│ │
│ │ │
│ │ │ │зубчатых передач -
несоосность. │ │пере- │ │ │
│ │ │
│ │ │
│ │Неравномерное
нагружение приводит │ │дачи, │ │ │
│ │ │
│ │ │
│ │к появлению
таких дефектов, как │ │соеди-│ │ │
│ │ │
│ │ │
│ │точечная
коррозия, заедание и излом │ │нения │ │ │
│ │ │
│ │ │
│ │зубьев. │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤
Соединительные элементы восприимчивы │ │ │
Дефекты │Ска- │ │
│ 5 │ │
5 │ │
│ │к
несоосностям и угловым силам. │ │ │соединений │чущая│ │
│ │ │
│ │ │ │ Вибрация повышается также
вследствие │ │ │ │ │
│ │ │ │
│ │ │ │малого демпфирования или
трения │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Крити-│ Ротор │Сдвиг│ │
5 │ 3 │ 2
│ │ │
│ │ Даже
незначительный дисбаланс может │ │ческие│(жесткие │на │
│ │ │
│ │ │
│ │привести к
большому прогибу вала │ │ско- │подшипники) │180° │ │
│ │ │
│ │ │ │из-за действия центробежной
силы │ │рости ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤на
критической скорости вращения. │ │ │
Система │Изме-│ │
5 │ 3 │ 2
│ │ │
│ │Отличие от
резонанса в том, что вал │ │ │"ротор
- │няю- │ │
│ │ │
│ │ │ │не вибрирует
"вперед-назад", │ │ │подшипники" │щаяся│ │
│ │ │
│ │ │ │а вращается с постоянно
возрастающим │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤(при
одинаковом демпфировании │ │ │
Соединения │Изме-│ │
2 │ 4 │ 2
│ 2 │
│ │ │в радиальном направлении)
прогибом. │ │ │ │няю- │ │
│ │ │
│ │ │ │Вал будет изгибаться, а не
накапливать│ │ │ │щаяся│ │
│ │ │
│ │ │ │усталостные повреждения, как
при │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤резонансе.
Вибрация может быть │ │ │
Консольная │Изме-│ │
5 │ 4 │ 1
│ │ │
│ │уменьшена
балансировкой. Резонансы │ │ │часть │няю- │ │
│ │ │
│ │ │ │могут быть ограничены
внутренним │ │ │ │щаяся│ │
│ │ │
│ │ │ │демпфированием │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Резо- │ Резонанс │Ска- │ 4 │ │ 3
│ 3 │ │
│ │ │ На резонансах не возникает │ │нансы │на основной │чущая│ │
│ │ │
│ │ │ │собственная вибрация, но
усиливается │ │ │частоте │ │
│ │ │
│ │ │
│ │вибрация от
других источников. │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤Усиление
обычных колебаний машин │ │ │
Резонанс на │Неус-│ 8 │ │
│ 2 │ │
│ │ │вращательного действия или
пульсаций │ │ │субгармонике │той- │ │
│ │ │
│ │ │ │в трубопроводах может
привести │ │ │ │чивая│ │
│ │ │
│ │
│ │к созданию
опасных ситуаций. │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤
Угловая вибрация внешне обычно │ │ │
Резонанс │ │
│ │ 4 │ 2
│ 4 │
│ │ │малозаметна, поскольку
накладывается │ │ │на
гармонике │ │
│ │ │
│ │ │
│ │на
вращательное движение, наподобие │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤имеющего
место при работе активатора │ │ │
Резонанс │ │
2 │ │ 2
│ 6 │ │
│ │ │стиральной машины. Поэтому
повреждения│ │ │корпуса │ │
│ │ │
│ │ │
│ │могут не
давать о себе знать до тех │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤пор,
пока не появится характерный шум │ │ │
Резонанс │ │
2 │ │ 2
│ 6 │ │
│ │ │зубчатой передачи, возрастет
вибрация │ │ │опоры │ │ │
│ │ │
│ │ │ │корпуса и подшипников. Для
обнаружения│ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤угловых
колебаний необходимы │ │ │
Резонанс │ │
│ 1 │ 8
│ 1 │ │
│ │ │специальные датчики. Если │ │ │основания │ │
│ │ │
│ │ │
│ │частота
резонанса угловых │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤колебаний
совпадает с частотой │ │ │
Резонанс │ │
1 │ 2 │
2 │ 3 │
1 │ 1 │ │ │электропитания, последствия │ │ │угловых │ │
│ │ │
│ │ │
│ │могут стать
весьма серьезными │ │ │колебаний │ │
│ │ │
│ │ │
│ │ │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Причи-│ Дефекты │Ска- │ 1 │ 1 │
3 │ 5 │
│ │ │ │ Стробоскоп позволит
"заморозить" │ │ны │ремней │чущая│ │
│ │ │
│ │ │ │дефект ремня. Правильная
подгонка │ │разной│ │
│ │ │
│ │ │
│ │ │ремней, их равномерное
натяжение │ │приро-├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤и
центровка снижают вибрацию. │ │ды │
Возвратно- │Ска- │ │
8 │ 2 │
│ │ │
│ │ Циклические
силы в машине │ │ │поступательное
│чущая│ │ │
│ │ │
│ │ │возвратно-поступательного │ │ │движение │ │
│ │ │
│ │ │
│ │действия можно уменьшить
только │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤изменением
ее конструкции или │ │ │
Аэро-, гидро- │Ста- │ │ 3 │
2 │ 1 │
2 │ 2 │ │ │изоляцией. │ │ │динамические │биль-│ │
│ │ │
│ │ │ │ Аэро-, гидродинамические
силы │ │ │силы │ная │
│ │ │
│ │ │
│ │проявляются
обычно на лопастных │ │ │ │ │
│ │ │
│ │ │
│ │частотах.
Случайные пульсации могут │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤возбуждать
резонансы. │ │ │
Гистерезисный │Ска- │ 6 │
│ 2 │ 2 │
│ │ │ │ Гистерезисные вихри редки, но
опасны.│ │ │вихрь │чущая│ │
│ │ │
│ │ │ │Появляются после прохождение
ротора │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤через
критическую скорость. │ │ │
Вихри в слое │Ска- │ 6 │ │ 1
│ 2 │ │
│ 1 │
│ Завихрения в слое масла связаны │ │ │масла │чущая│ │
│ │ │
│ │ │ │с толчками вала в зазоре
подшипника, │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤обусловленными
изменениями давления │ │ │
Срыв потока │Ска- │ 6 │ │ 2
│ 2 │ │
│ │ │масла. Частота на 2% - 8%
ниже │ │ │воздуха │чущая│ │
│ │ │
│ │ │ │половины частоты вращения
вследствие │ │ │ │ │
│ │ │
│ │ │
│ │эффектов
трения. │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤
Обратный вихрь появляется │ │ │
Обратный │Ска- │ │
│ │ │
│ │ │
10 │в результате трения
шеек ротора │ │ │(сухой)
вихрь │чущая│ │
│ │ │
│ │ │ │о внутреннюю поверхность
подшипника │ ├──────┼───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┼──────────────────────────────────────┤ │Вибра-│ Некруглость │Ста- │ │
8 │ 2 │
│ │ │
│ │ Вибрация
электрического происхождения│ │ция │ротора │биль-│ │
│ │ │
│ │ │ │проявляется на частотах 60 и 120
Гц │ │элект-│ │ная │
│ │ │ │
│ │ │ │(1-я и 2-я гармоники сетевой
частоты) │ │ричес-├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤и
исчезает сразу же после отключения │ │кого │
Несоосность │Неус-│ │
5 │ 2 │ 3
│ │ │
│ │напряжения питания.
Модуляция │ │проис-│ротора и │той- │ │
│ │ │
│ │ │ │колебаний на основной частоте
может │ │хожде-│статора │чивая│ │
│ │ │
│ │ │ │быть связана с частотой
скольжения │ │ния ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤ротора,
умноженной на число полюсов. │ │ │
Эллиптичность │Ста- │ │ 6 │
2 │ 2 │
│ │ │ │Биения могут иметь место, если
две │ │ │зазора
статора │биль-│ │ │
│ │ │
│ │ │или несколько машин работают │ │ │ │ная │
│ │ │
│ │ │
│ │на близких
скоростях. Для обнаружения │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤механических
повреждений следует │ │ │
Дефект плас- │Ста- │ │
2 │ 6 │ 2
│ │ │
│ │использовать
соответствующие методы. │ │ │тин
коллектора │биль-│ │ │ │
│ │ │
│ │Отрыв
пластины коллектора │ │ │ │ная │
│ │ │
│ │ │
│ │обнаруживают,
подавая низкое │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤напряжение
питания на одну фазу │ │ │
Изгиб вала │Ста- │ │
8 │ 2 │
│ │ │
│ │и
проворачивая ротор рукой. │ │ │ротора │биль-│ │
│ │ │
│ │ │ │Скачок тока указывает на
оторванную │ │ │ │ная │
│ │ │
│ │ │
│ │пластину │ │ ├───────────────┼─────┼─────┼─────┼────┼────┼─────┼───┼──────┼───────┤ │ │ │
Расцентровка │Ста- │ │
3 │ 3 │ 4
│ │ │
│ │ │ │ │ротора
относи- │биль-│ │ │
│ │ │
│ │ │ │ │ │тельно
магнит- │ная │ │
│ │ │
│ │ │ │ │ │ │ного
поля │ │
│ │ │
│ │ │
│ │ │ ├──────┴───────────────┴─────┴─────┴─────┴────┴────┴─────┴───┴──────┴───────┴──────────────────────────────────────┤ │
<*> Дефекты механического
и электрического происхождения являются │ │источниками
вибрации, которая впоследствии преобразуется в воздушный шум. │ │Шум
механического происхождения может
быть связан с
дисбалансом │ │вентилятора или двигателя, шумом подшипников,
центровкой осей, колебаниями │ │стенок воздуховода и панелей корпуса,
вибрацией амортизаторов, лопастей, │ │заслонок,
труб и опор,
а также передачей
механических колебаний по │ │конструкции. Шум
электрического происхождения связан с различными формами │ │преобразования
электрической энергии: 1) магнитные
силы определяются │ │плотностью потока магнитной индукции, числом и
формой полюсов и геометрией │ │воздушного зазора; 2) случайный
электрический шум определяется
щетками, │ │дуговыми разрядами, электрическими искрами и
т.д.
│ │ Шум
аэродинамического происхождения может быть связан с
образованием │ │вихрей, пульсациями давления, сопротивлением
воздуха и т.д. и
иметь как
│ │широкополосную,
так и узкополосную
природу. Широкополосный шум могут │ │вызывать:
a) лопасти, заслонки и др.
преграды на пути воздушного потока; │ │b) вращения вентилятора в целом, ремней, прорезей
и т.д.; c) внезапные │ │изменения
направления воздушного потока
или поперечного сечения │ │воздуховода, разность скоростей в потоке,
разделение потока вследствие │ │граничных эффектов, эффектов сжатия потока и
т.д. Узкополосный шум могут │ │вызывать:
a) резонансы (эффект органных
труб, вибрации струн, панелей, │ │элементов конструкции и т.д.);
b) эффекты образования
вихрей на острых │ │краях (возбуждение столба воздуха); c)
вращения (эффект сирены, прорези, │ │отверстия, пазы на вращающихся частях).
│ │
Удары, создаваемые при
контакте различных механических
элементов │ │конструкции,
которые производят шум,
подобный производимому при
ударе
│ │молотком, раскате грома, резонансе пустого ящика и
т.д. На слух могут │ │восприниматься
соударения зубьев шестерен,
а также хлопки
дефектных │ │ремней. Ударные импульсы могут быть столь
быстротечны, что для того, чтобы │ │отличить
периодические ударные импульсы
от переходных процессов, │ │необходимо
использовать специальную высокоскоростную записывающую │ │аппаратуру.
Та область, где
производится много ударных
импульсов, │ │наложение их пиков создает эффект постоянного
гудения.
│ └──────────────────────────────────────────────────────────────────────────────────────────────────────────────────┘ C.2. Дисбаланс Это основной источник вибрации
вентиляторов; он характеризуется наличием составляющей вибрации на частоте
вращения (первой гармонике). Причина дисбаланса заключена в том, что ось
вращающейся массы расположена с эксцентриситетом или под углом к оси вращения.
Это может быть вызвано неравномерным распределением вращающихся масс, суммой
допусков на размеры отверстия втулки вентилятора и вала, изгибом вала или
сочетанием этих факторов. Вибрация, обусловленная дисбалансом, действует
преимущественно в радиальном направлении. Временный изгиб вала может быть
следствием неравномерного нагрева механической - вследствие трения вращающихся
и неподвижных элементов конструкции - или электрической (см. C.6) природы.
Постоянный изгиб может образоваться в результате изменений свойств материала
или вследствие несоосности вала и колеса вентилятора при раздельном креплении
вентилятора и электродвигателя (см. C.3). В процессе эксплуатации дисбаланс колеса
может возрастать из-за осаждения на него частиц воздуха. При работе в
агрессивной среде появление дисбаланса может быть связано с неравномерной
эрозией или коррозией колеса. Дисбаланс может быть устранен
дополнительной балансировкой в соответствующих плоскостях, но перед проведением
процедуры балансировки необходимо установить источники появления дисбаланса,
устранить их и проверить стабильность вибрационного состояния машины. C.3. Несоосность Данный дефект может иметь место в случае,
когда валы электродвигателя и вентилятора соединены через ременную передачу или
с помощью гибкой муфты. Несоосность иногда можно обнаружить по характерным
частотным составляющим вибрации, как правило, это первая и вторая гармоники
оборотной частоты Если валы соединены под углом друг к
другу и при этом использованы жесткие соединительные муфты, то в машине
начинают действовать знакопеременные силы, вызывающие повышенный износ валов и
муфт. Этот эффект может быть существенно ослаблен использованием гибких
соединений. C.4. Аэродинамическое возбуждение Возбуждение вибрации может быть
обусловлено взаимодействием колеса вентилятора со стационарными элементами
конструкции, такими как направляющие лопасти, электродвигатель или
подшипниковые опоры, неверно выбранными значениями зазоров или неправильно
спроектированными конструкциями воздухозабора и воздухоотвода. Характерной
особенностью данных источников является возникновение периодической вибрации,
связанной с частотой вращения колеса, на фоне случайных флуктуаций
взаимодействия лопастей колеса с воздухом. Вибрацию можно наблюдать на
гармониках лопастной частоты, которая представляет собой произведение частоты
вращения колеса на число лопастей колеса. Аэродинамическая нестабильность потока,
обусловленная его срывом с поверхности лопасти и последующим вихреобразованием,
вызывает появление широкополосной вибрации, форма спектра которой изменяется в
зависимости от нагрузки вентилятора. Аэродинамический шум характерен тем, что
он не связан с частотой вращения колеса и может проявляться на субгармониках
частоты вращения (т.е. на частотах ниже оборотной). При этом наблюдается
значительная вибрация корпуса вентилятора и воздуховодов. Если аэродинамическая система вентилятора
плохо согласована с характеристиками последнего, в нем могут наблюдаться резкие
толчки. Такие толчки хорошо различимы на слух и передаются в виде импульсов на
систему опоры вентилятора. Если упомянутые выше причины приводят к
вибрации лопастей, ее природу можно исследовать, устанавливая датчики в разные
места конструкции. C.5. Завихрения в слое масла Завихрения, которые могут возникать в
слое смазки подшипников скольжения, наблюдают на характерной частоте немного
ниже оборотной частоты ротора, если только вентилятор не работает на скорости,
превышающей первую критическую. В последнем случае нестабильность масляного
клина будет наблюдаться на первой критической скорости, и иногда этот эффект
называют резонансным вихрем. C.6. Источники электрической природы Неравномерный нагрев ротора
электродвигателя может привести к его прогибу, который обусловит появление
дисбаланса (проявляющегося на первой гармонике). В случае асинхронного двигателя появление
составляющей на частоте, равной частоте вращения, умноженной на число пластин
ротора, означает наличие дефектов, связанных с пластинами статора, и наоборот,
составляющие на частоте вращения, умноженной на число пластин ротора,
свидетельствуют о дефектах, связанных с пластинами ротора. Для многих составляющих вибрации
электрической природы характерно их немедленное исчезновение с отключением
электропитания. C.7. Возмущения от ременного привода В общем случае существует два вида
проблем, связанных с ременным приводом, когда на работу этого привода оказывают
влияние сторонние дефекты и когда дефекты имеют место на самом ремне. В первом случае, хотя ремень и вибрирует,
это является следствием вынуждающих сил со стороны других источников, поэтому
замена ремня не принесет желаемых результатов. Обычными источниками таких сил
являются дисбаланс в системе привода, эксцентриситет шкивов, несоосность и
ослабление механических соединений. Таким образом, прежде чем менять ремни,
необходимо провести анализ вибрации для выявления источника возбуждения. Если ремни реагируют на внешние
вынуждающие силы, частота их вибрации будет, скорее всего, той же самой, что и
частота возмущения. При этом частоту возмущения можно определить с помощью
стробоскопической лампы, настраивая ее таким образом, чтобы в свете лампы
ремень казался неподвижным. В случае многоременного привода
неодинаковое натяжение ремней может привести к тому, что передаваемая на них
вибрация будет усилена многократно. Случаи, когда источниками вибрации
являются сами ремни, связаны с их физическими дефектами: трещинами, местами
уплотнения и размягчения, грязью на поверхности ремня, вырванным материалом с
его поверхности и т.д. Для клиновидных ремней изменения их ширины будут
приводить к тому, что ремень будет ездить вверх-вниз по дорожке шкива, создавая
тем самым вибрацию вследствие изменения своего натяжения. Если источником вибрации является сам
ремень, частотами, на которых эта вибрация обнаруживается, обычно будут
гармоники частоты вращения ремня. В конкретном случае частота возбуждения будет
зависеть от природы дефекта, а также от числа шкивов, включая натяжные. В некоторых случаях амплитуда вибрации
может быть нестабильна. Особенно это справедливо для многоременной передачи. Приложение D (справочное) ЗАВИСИМОСТЬ ВИБРАЦИИ ОТ ТИПА ОПОРЫ ВЕНТИЛЯТОРА Правильный выбор конструкции опоры или
основания вентилятора необходим для его плавной, безотказной работы. Для
обеспечения соосности вращающихся узлов при установке вентилятора,
электродвигателя и других устройств привода используют рамную конструкцию из
строительной стали или основание из железобетона. Иногда попытка сэкономить при
строительстве опоры приводит к невозможности поддерживать требуемую соосность
узлов машины. Это особенно неприемлемо в случае, когда вибрация чувствительна к
изменению степени соосности, в частности для машин, состоящих из отдельных
частей, соединенных вместе металлическими креплениями. Фундамент, на который положено основание,
также может оказывать влияние на вибрацию вентилятора и двигателя. Если
собственная частота колебаний фундамента близка к частоте вращения вентилятора
или двигателя, фундамент в процессе работы вентилятора будет резонировать. Это
можно обнаружить, если проводить измерения вибрации на некотором расстоянии
друг от друга по всему фундаменту, окружающему полу и на опорах вентилятора.
Часто в условиях резонанса вертикальная составляющая вибрации существенно
превышает горизонтальную. Вибрацию можно погасить, выполнив конструкцию
фундамента более жесткой или увеличив его массу. Даже при условии устранения
дисбаланса и несоосности соединений, позволяющего уменьшить вынуждающие силы,
предпосылки возникновения значительной вибрации могут существовать. Это означает,
что если вентилятор вместе со своей опорой близки к резонансу, для достижения
приемлемых значений вибрации будут необходимы более точная балансировка и более
точное центрирование валов, чем это требуется обычно для данных машин. Такое
положение нежелательно, и его следует избегать, увеличивая массу и (или)
жесткость конструкции опоры или бетонного блока. Приложение E (справочное) ПРИМЕРЫ РАСЧЕТА ДИСБАЛАНСОВ Пример 1 Осевой вентилятор теплообменника с
колесом массой M = 25 кг, диаметром 1000 мм и максимальной частотой вращения
1800 Для класса точности балансировки - G 6,3
(см. график на рисунке E.1, взятый из ГОСТ ИСО 1940-1) максимально допустимое
значение удельного дисбаланса
Рисунок E.1. Допустимое значение удельного
дисбаланса для разных классов точности балансировки Соответственно максимальное значение
корректирующей массы
Пример 2 Рисунок E.2 иллюстрирует процесс
динамической балансировки многолопастного колеса массой 2,5 кг, диаметром 250
мм и максимальной частотой вращения 3600
Примечание. Значения дисбалансов в г x
мм. Рисунок E.2. Коррекция динамической
неуравновешенности Начальная динамическая неуравновешенность
ротора определена через главный вектор дисбалансов 240 г x мм на расстоянии 50
мм от первой плоскости коррекции и пару кососимметричных дисбалансов 120 г x мм
в плоскостях коррекции под прямым углом к главному вектору дисбалансов. Для устранения статической
неуравновешенности в плоскостях коррекции размещают корректирующие массы,
вносящие суммарный дисбаланс 240 г x мм, направленный противоположно главному
вектору начального дисбаланса. Распределение корректирующих масс должно быть
таким, чтобы создать равные по модулю, но противоположно направленные моменты
относительно центра масс, т.е. 160 г x мм и 80 г x мм (160 г x мм x 50 мм = 80
г x мм x 100 мм). Для устранения моментной неуравновешенности
в каждой плоскости коррекции размещают корректирующие массы, создающие пару
кососимметричных дисбалансов по 120 г x мм и направленные противоположно
кососимметричным дисбалансам начальной моментной неуравновешенности. Суммирование векторов дисбалансов,
внесенных корректирующими массами, дает значения 200 и 144 г x м в плоскостях
коррекции в направлениях, как показано на рисунке E.2. Это позволяет определить
значения корректирующих масс:
Пример 3 То же колесо (рисунок E.2), установленное
консольно относительно корпуса массой 1,5 кг с подшипниковыми опорами на
расстоянии 80 мм друг от друга. Если колесо должно быть уравновешено в
соответствии с классом точности G 6,3, то значение удельного дисбаланса для
частоты вращения 60 Предельное значение модуля главного
вектора дисбаланса:
Предельное значение модуля главного
момента дисбаланса:
И в том, и в другом случае это составляет
одну шестую часть начальных дисбалансов из примера 2. В случае статической неуравновешенности
предельно допустимый дисбаланс обусловит появление эквивалентной силы реакции
опор, сосредоточенной посередине между подшипниками <*>. Результат
действия на ротор <**> этих двух противоположно направленных сил, вызванных
дисбалансом и реакцией подшипниковых опор, будет эквивалентен действию главного
момента дисбаланса, модуль которого равен 40 x 140 = 5600 г x мм2. -------------------------------- <*> Здесь предполагается, что
допустимое значение дисбаланса, определяемое на основе класса точности
балансировки, распределено между плоскостями допуска, что противоречит
рекомендациям ГОСТ ИСО 1940-1. <**> Здесь исправлено неверное
утверждение оригинала - ИСО 14694:2203, - будто эквивалентный главный момент
дисбаланса действует не на ротор, а на подшипники. Приложение F (рекомендуемое) РУКОВОДСТВО ПО КОНТРОЛЮ ВИБРАЦИОННОГО СОСТОЯНИЯ И ДИАГНОСТИКЕ Основной принцип контроля вибрационного
состояния машин (далее - состояние) заключается в наблюдении за результатами
правильно спланированных измерений, чтобы иметь возможность выявить тенденцию к
нарастанию уровня вибрации и рассмотреть ее с точки зрения появления возможных
проблем. Контроль применим в тех ситуациях, когда повреждения развиваются
медленно и ухудшение состояния механизма проявляется через физические признаки,
доступные измерению. Вибрацию вентиляторов, являющуюся
следствием развития физических дефектов, можно контролировать через некоторые
заданные промежутки времени, а при обнаружении повышения уровня вибрации
увеличить частоту наблюдений и провести детальный анализ состояния. При этом
причины изменения вибрации могут быть обнаружены на основе анализа частотного
состава вибрации, что позволяет определить перечень необходимых мер и
запланировать их выполнение задолго до того, как повреждение достигнет
серьезных размеров. Обычно принятие мер считают необходимым, когда уровень
вибрации повышается по сравнению с базовым в 1,6 раза или на 4 дБ. Программа контроля состояния состоит из
нескольких этапов, которые кратко могут быть сформулированы следующим образом: a) идентифицировать состояние вентилятора
и определить базовый уровень вибрации (он, возможно, будет отличаться от
уровня, полученного в ходе заводских испытаний, вследствие разных способов
установки и т.д.); b) выбрать точки измерений вибрации; c) определить периодичность наблюдений
(измерений); d) установить порядок регистрации
информации; e) определить критерии оценки
вибрационного состояния вентилятора, предельные значения для абсолютной
вибрации и для изменений вибрации, обобщить опыт эксплуатации машин
аналогичного типа. Поскольку на скоростях, не приближающихся
к критической, вентиляторы работают обычно без каких-либо проблем, уровень
вибрации не должен существенно изменяться при небольшом изменении скорости или
нагрузки, но важно учесть, что в случае, когда вентилятор работает с переменной
частотой вращения, установленные предельные уровни вибрации относятся к
максимальной рабочей частоте вращения. Если в рамках установленного допуска на
вибрацию максимальная частота вращения не может быть достигнута, это может
служить признаком наличия какой-либо серьезной проблемы и нуждаться в специальном
исследовании. Некоторые рекомендации по
диагностированию, приведенные в Приложении C, основаны на опыте эксплуатации
вентиляторов и предназначены для последовательного применения при анализе
причины повышенной вибрации. Для качественной оценки вибрации
конкретного вентилятора и определения руководства для последующих действий
могут быть использованы границы зон вибрационного состояния, установленные ГОСТ
ИСО 10816-1. Следует ожидать, что для новых
вентиляторов уровни их вибрации будут лежать ниже предельных значений,
приведенных в таблице 3. Эти значения соответствуют границе зоны А
вибрационного состояния по ГОСТ ИСО 10816-1. Рекомендуемые значения для уровней
предупреждения и останова установлены исходя из анализа информации, собранной
по вентиляторам конкретных видов. Приложение G (рекомендуемое) ВОЗМОЖНОСТЬ СНИЖЕНИЯ ТРЕБОВАНИЙ К ВИБРАЦИИ И КАЧЕСТВУ БАЛАНСИРОВКИ Изготовителю вентиляторов нет
необходимости проводить точную балансировку колеса вентилятора для заказчика,
который предъявляет пониженные требования к качеству балансировки и уровню
вибрации. По соглашению между изготовителем и заказчиком ими могут быть
использованы более высокие предельные значения, но рекомендуется, чтобы
допустимое значение дисбаланса, указанное в таблице 2, было увеличено не более
чем в 2,5 раза, а допустимый уровень вибрации, указанный в таблице 5, - не
более чем в 1,6 раза. Приложение H (справочное) СВЕДЕНИЯ О СООТВЕТСТВИИ ССЫЛОЧНЫХ МЕЖДУНАРОДНЫХ СТАНДАРТОВ МЕЖГОСУДАРСТВЕННЫМ СТАНДАРТАМ, ИСПОЛЬЗОВАННЫМ В НАСТОЯЩЕМ СТАНДАРТЕ В КАЧЕСТВЕ НОРМАТИВНЫХ ССЫЛОК Таблица H.1
Приложение J (справочное) ИЗМЕНЕНИЕ СТРУКТУРЫ НАСТОЯЩЕГО СТАНДАРТА ПО ОТНОШЕНИЮ К СТРУКТУРЕ ИСО 14694:2003 Указанное в таблице J.1 изменение
структуры межгосударственного стандарта относительно структуры примененного
международного стандарта обусловлено приведением в соответствие с требованиями
ГОСТ 1.5-2001. Таблица J.1
БИБЛИОГРАФИЯ [1] ИСО 254:1998. Передачи ременные.
Шкивы. Качество, чистота обработки и точность балансировки (ISO 254:1998) (Belt drives - Pulleys - Quality, finish and balance) [2] ИСО 4863:1984. Муфты упругие.
Сведения, предоставляемые изготовителями и потребителями (ISO 4863:1984) (Resilient shaft couplings - Information to be supplied
by users and manufacturers). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||