| Утвержден и введен в действие Постановлением Госстандарта СССР от 28 ноября 1991 г. N 1825 ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР СИСТЕМА СТАНДАРТОВ БЕЗОПАСНОСТИ ТРУДА ЭКСКАВАТОРЫ ОДНОКОВШОВЫЕ ОБЩИЕ ТРЕБОВАНИЯ БЕЗОПАСНОСТИ И ЭРГОНОМИКИ К РАБОЧЕМУ МЕСТУ МАШИНИСТА И МЕТОДЫ ИХ КОНТРОЛЯ Occupational
safety standards system. Single-bucket
excavators.
General safety and ergonomical requirements for the operator's position and methods of their control ГОСТ 12.2.130-91 Группа Т58 ОКП 48 1000 Дата введения 1 января 1993 года ИНФОРМАЦИОННЫЕ
ДАННЫЕ 1. Разработан и внесен Министерством
тяжелого машиностроения СССР. Разработчики: А.П. Коломейцев; С.П. Хватков; Б.П.
Антонов; В.С. Головин, канд. техн. наук (руководитель
темы); К.П. Гедык; Л.П. Лапина; В.П. Головин; С.Ф.
Блик; Н.М. Скрипова; Н.Н. Груздева; А.И. Сапожников;
В.И. Хазак, канд. техн.
наук; Л.Л. Прилуцкий; В.А. Казаков; Г.В. Пименова;
Л.А. Томилова; Б.Л. Степанов, канд. техн. наук; В.Д.
Карпухин, канд. техн. наук; Л.Г. Зотова. 2. Утвержден и введен в действие
Постановлением Комитета стандартизации и метрологии СССР от 28.11.1991 N 1825. 3. Срок проверки - 1998 г., периодичность
проверки - 5 лет. 4. Введен впервые. 5. Ссылочные нормативно-технические
документы ─────────────────────────────────┬──────────────────────────────── Обозначение НТД, на который дана │ Номер пункта, приложения ссылка │ ─────────────────────────────────┼──────────────────────────────── ГОСТ 12.1.003-83 │1.2.4 ГОСТ 12.1.005-88 │1.2.2, 2.18 ГОСТ 12.1.006-84 │Приложение 1 ГОСТ 12.1.012-90 │1.2.5.2, Приложение 4 ГОСТ 12.1.016-79 │2.18 ГОСТ 12.1.028-80 │Приложение 3 ГОСТ 12.1.050-86 │Приложение 3 ГОСТ 12.2.049-80 │1.2.1.1 ГОСТ 12.2.064-81 │1.1.10, 1.3.1 ГОСТ 12.2.106-85 │2.17, Приложение 1 ГОСТ 12.4.012-83 │Приложение 4 ГОСТ 12.4.040-78 │1.1.11 ГОСТ 20.39.108-85 │Приложение 1 ГОСТ 29.05.002-82 │1.1.4 ГОСТ 5727-88 │1.2.1.3 ГОСТ 15150-69 │1.2.1.2 ГОСТ 16504-81 │Приложение 4 ГОСТ 21753-76 │1.1.7, 1.1.8 ГОСТ 21786-76 │1.1.4 ГОСТ 22613-77 │1.1.7, 1.1.9 ГОСТ 22614-77 │1.1.7, 1.1.9 ГОСТ 22615-77 │1.1.7, 1.1.9 ГОСТ 22902-78 │1.1.4 ГОСТ 23000-78 │1.1.3, 1.1.13 ГОСТ 26387-84 │Приложение 1 ГОСТ 27250-87 │1.2.1, Приложение 2 ГОСТ 27258-87 │1.1.6, 2.3; 2.7 Настоящий стандарт распространяется на
вновь разрабатываемые и модернизируемые одноковшовые карьерные, гидравлические
и шагающие экскаваторы с ковшом вместимостью 5 м3 и более (далее - экскаваторы)
и является основой при подготовке к сертификационным испытаниям экскаваторов. Стандарт устанавливает общие
эргономические требования к постоянному рабочему месту машиниста и методы их
контроля. Термины, применяемые в настоящем
стандарте, и их пояснения приведены в Приложении 1. Требования пп.
1.1.2 - 1.1.11, 1.1.13 - 1.1.15, 1.2.1 - 1.2.6, 1.3.1, 1.3.2, 2.3 - 2.7, 2.9,
2.17 - 2.25 настоящего стандарта являются обязательными, другие требования настоящего
стандарта являются рекомендуемыми. 1. ЭРГОНОМИЧЕСКИЕ
ТРЕБОВАНИЯ 1.1. Управляемость 1.1.1. Распределение функций между
человеком и машиной следует определять степенью автоматизации исполнительных
операций при управлении и контроле состояния механизмов. 1.1.1.1. Схемы автоматизированного
управления экскаватором должны предусматривать полную или частичную
автоматическую коррекцию технологических операций процессов копания (черпания),
перемещения стрелы и ковша. Должны быть предусмотрены системы регулирования
нагрузок в механизмах, ограничения координат перемещения ковша, блокировочных
устройств, устройств защиты, дистанционного контроля (по требованию заказчика),
диагностирования состояния оборудования и счетчик количества загруженных
транспортных средств. 1.1.2. Обзор и видимость объектов
преимущественного и периодического наблюдений должны быть обеспечены из области
расположения точки зрения (ОРТЗ) с учетом возможных изменений рабочей позы
машиниста. Оценку обзорности с рабочего места машиниста проводят по
коэффициенту обзорности (КО), который должен быть не
менее 0,6/0,5. На участке лобового остекления не должно
быть визуальных помех в направлении нормальной линии взгляда машиниста,
сидящего в рабочей позе. 1.1.3. Средства отображения информации
(СОИ) должны обеспечивать получение и анализ данных о состоянии оборудования,
механизмов и некоторых технологических параметров с применением, по
возможности, микропроцессорной техники. Визуальные СОИ допускается располагать в
пределах максимальных углов обзора в соответствии с ГОСТ 23000. Лицевые поверхности СОИ следует
располагать в плоскостях, перпендикулярных к линии взгляда машиниста, сидящего
в кресле. Допускается отклонение плоскостей до 45°. 1.1.4. При выборе визуальных СОИ следует
руководствоваться ГОСТ 22902 для шкальных индикаторов и механических счетчиков
и ГОСТ 29.05.002 - для знакосинтезирующих
индикаторов. Выбор акустических индикаторов неречевых
сообщений для подачи аварийных и предупредительных сигналов - по ГОСТ 21786. 1.1.5. В кабине должно быть предусмотрено
место для средств связи с участниками совместной
работы в пределах досягаемости с рабочего места машиниста. 1.1.6. Основные и аварийные органы
управления (ОУ) должны быть расположены в зоне комфорта, вспомогательные - в
пределах зон досягаемости в соответствии с ГОСТ 27258. 1.1.7. При размещении ОУ на панелях
управления следует соблюдать минимальные расстояния между ними в соответствии с
ГОСТ 21753, ГОСТ 22613, ГОСТ 22614 и ГОСТ 22615. 1.1.8. Рычаги управления должны иметь
параметры по ГОСТ 21753. Необходимо обеспечить фиксацию или
индикацию нулевого положения рукояток. Значения усилий, прилагаемых к рукояткам
рычагов управления, не должны превышать 15 Н при частоте использования более
120 раз в час. 1.1.9. Кнопочные выключатели и переключатели
должны соответствовать ГОСТ 22614; поворотные выключатели и переключатели -
ГОСТ 22613. Выключатели и переключатели типа "тумблер" должны
соответствовать ГОСТ 22615. 1.1.10. Ножные ОУ должны соответствовать
ГОСТ 12.2.064. 1.1.11. СОИ и ОУ следует кодировать
символами или надписями. Символы и надписи должны соответствовать ГОСТ
12.4.040. 1.1.12. При компоновке панелей пультов
управления (ПУ) следует объединять СОИ и ОУ в функциональные и последовательные
группы, учитывать логические и пространственные связи между ними. 1.1.13. ПУ для работы машиниста в положении
сидя должны иметь пространство для ног со следующими размерами по ГОСТ 23000:
по высоте не менее 600 мм, по глубине - не менее 400 мм на уровне колен и не
менее 600 мм на уровне пола, по ширине - не менее 500 мм. При отсутствии ножных
командных аппаратов следует предусмотреть подставку для ног шириной не менее
420 мм, глубиной - не менее 345 мм и углом наклона 10° - 15°. 1.1.14. ПУ шаганием
(для шагающих экскаваторов) должен иметь высоту, обеспечивающую управление в
положении сидя или стоя. Для работы в положении стоя высота рабочей поверхности
должна быть 920 - 1060 мм, а пространство для стоп должно иметь следующие
минимальные размеры: 150 мм - по глубине и высоте, 530 мм - по ширине. 1.1.15. Кресло должно создавать условия
для поддержания корпуса человека в физиологически рациональном положении, в том
числе за счет профилирования спинки и сиденья, а также обеспечивать условия для
отдыха. Кресло должно иметь следующие основные
размеры, мм: ширина поверхности сиденья, не менее .......... 400 глубина поверхности сиденья ................... 400 - 420 высота спинки, не менее ....................... 500 ширина опорной поверхности спинки, не менее ... 400 Регулируемая высота поверхности сиденья от уровня установки ног: ...................... 360 - 450 горизонтальное (продольное) регулирование, не менее ...................................... 100 высота подлокотников, мм ...................... 200 - 240 ширина подлокотников, не менее, мм ............ 50 длина подлокотников, мм ....................... 250 - 300 1.1.16. Факторы трудового процесса при
управлении экскаватором: внешняя механическая работа, рабочая
поза, число объектов преимущественного наблюдения, длительность
сосредоточенного наблюдения от времени смены, число информационных сигналов,
монотонность и темп работы - следует учитывать при организации рабочего места
машиниста. 1.2. Обитаемость 1.2.1. Требования к кабине машиниста 1.2.1.1. Минимальное рабочее пространство
вокруг машиниста с антропометрическими признаками 95 перцентиля группы
населения Б и по ГОСТ 12.2.049 должно соответствовать
требованиям ГОСТ 27250. Ширина прохода к креслу на высоте 750 мм от пола должна
быть не менее 300 мм. Рекомендуется сиденье помощника
изготовлять размером не менее 350 х 380 мм и располагать на высоте 420 - 450
мм. Допускается делать его откидным и крепить к стенке кабины. 1.2.1.2. Кабина должна быть оборудована
средствами или устройствами: 1) для предотвращения запотевания и
обмерзания стекол при температуре наружного воздуха до минус 40 °С, по требованию заказчика для исполнения ХЛ по ГОСТ 15150
- до минус 55 °С; 2) для защиты глаз машиниста от прямых
солнечных лучей (солнцезащитные козырьки, тонированные стекла и др.); 3) для очистки наружной поверхности
лобового стекла от загрязнения и атмосферных осадков, обеспечивающими
рациональные зоны очистки; 4) для установления, регулирования и
поддержания комфортных микроклиматических условий; 5) для аварийного покидания кабины. 1.2.1.3. Остекление кабины должно быть
устойчивым к механическому воздействию по ГОСТ 5727. Окна должны иметь форточки
или частично открываться. Стекла по периметру должны иметь вибродемпфирующую
прокладку. 1.2.1.4. Для подъема на рабочее место
машиниста на экскаваторе должна быть установлена безопасная лестница с высотой
перил от поверхности ступени 850 - 950 мм. 1.2.1.5. Дверной проем должен иметь
высоту не менее 1900 мм, ширину не менее 650 мм (для исполнения ХЛ - не менее
750 мм) с учетом уплотнения. Запорное устройство и уплотнение должны
обеспечивать герметичность и безотказное открывание и
закрывание двери. 1.2.2. Запыленность Содержание аэрозолей фиброгенного
действия в воздухе на постоянном рабочем месте машиниста не должно превышать
предельно допустимых концентраций по ГОСТ 12.1.005. 1.2.3. Температура, относительная
влажность и скорость движения воздуха в кабине управления должны
соответствовать для категорий работ средней тяжести IIа и IIб значениям,
указанным в табл. 1. Таблица 1 ───────────────────────┬─────────────┬─────────────┬────────────── Сезон года │ Температура │Относительная│ Скорость │ воздуха, °С │ влажность │ движения │ │ воздуха, % │ воздуха, м/с ───────────────────────┼─────────────┼─────────────┼────────────── Теплый период │Не выше +31 │25 - 75 │0,2 - 0,7 Холодный и переходный │От +15 до +23│25 - 75 │0,3 - 0,4 периоды │ │ │ Примечание. Вертикальный и горизонтальный
перепад температур не должен превышать 4 °С. В районах с повышенной относительной
влажностью наружного воздуха допускается для теплого периода года относительная
влажность в кабине на 10% выше установленной в табл. 1. Температура металлических поверхностей
стен внутри кабины на высоте не более 0,5 мм не должна превышать плюс 35 °С. 1.2.4. Шумовыми характеристиками
экскаваторов являются: эквивалентный (по энергии) уровень звука, дБА, излучаемый экскаватором в окружающую среду в контрольной
точке; эквивалентный (по энергии) уровень звука, дБА,
на рабочем месте машиниста. Эквивалентный уровень звука, излучаемый
экскаватором в окружающую среду в контрольной точке и на рабочем месте, не
должен превышать 80 дБА по ГОСТ 12.1.003. 1.2.5. Вибрационными характеристиками на
постоянном рабочем месте машиниста экскаватора являются: корректированные
значения виброускорения в диапазоне частот 1,4 - 90
Гц (интегральный метод) или средние квадратические
значения виброскорости или виброускорения
(или их логарифмические уровни) в октавных или 1/3-октавных полосах частот
(спектральный метод) на сиденье машиниста; корректированные значения виброускорения в диапазоне частот 5,6 - 1410 Гц или средние
квадратические значения виброскорости
или виброускорения в октавных полосах частот на
рукоятках управления. 1.2.5.1. Допустимые корректированные
значения виброускорения не должны превышать значений,
приведенных в табл. 2 или в табл. 9 ГОСТ 12.1.012. Таблица 2 ───────────────────────────────────────┬────────────────────────── Вид вибрации │ Допустимые │корректированные значения │ виброускорения, м/с2 ───────────────────────────────────────┼────────────────────────── Общая категория: │ на сиденье машиниста в направлении │0,27 x, y, z <*> │ Локальная: │ на рукоятках управления в направлении │2,0 движения руки │ -------------------------------- <*> Технически достижимая
вибрационная характеристика должна быть не более 0,54 м/с2. 1.2.5.2. Допустимые средние квадратические значения виброскорости
и виброускорения в октавных и 1/3-октавных полосах
частот на сиденье машиниста и на рукоятках управления не должны превышать
значений, приведенных в табл. 9 и 12 ГОСТ 12.1.012. 1.2.6. Освещенность Освещенность в люксах на постоянном
рабочем месте и поверхности забоя при всех включенных осветительных приборах
должна соответствовать следующим значениям: пульт управления при работе экскаватора ........ 20 стол для записей (для шагающих экскаваторов).... 150 зона объекта различения ........................ 75 зона под стрелой в крайней точке черпания ...... 10 1.2.7. Санитарно-бытовые требования В кабине должны быть предусмотрены места
для хранения инструмента, документации, спецодежды, аптечки и термоса, а также
емкость для питьевой воды и кружка. 1.3. Обслуживаемость 1.3.1. На рабочем месте машиниста должно
быть руководство для оператора, содержание которого должно соответствовать
требованиям ГОСТ 12.2.064. Качество оформления документации должно учитывать
условия эксплуатации. 1.3.2. В конструкции оборудования
рабочего места машиниста должны быть предусмотрены доступы и смотровые
отверстия со следующими минимальными размерами: для кисти руки 65 х 100 мм, для
вытянутой руки - 150 х 200 мм и обеспечена безопасность обслуживания. 1.3.3. Для обслуживания и ремонта
оборудования рабочего места в кабине должно быть предусмотрено место для
хранения мелкого инструмента. 1.3.4. Должно быть обеспечено удобство
мойки и уборки кабины. 1.4. Осваиваемость 1.4.1. Эксплуатирующая экскаватор
организация должна: 1) организовать
профессионально-психофизиологический отбор операторов; 2) организовать обучение и тренировки
машинистов с заданной периодичностью с применением тренажеров в условиях,
приближенных к реальным, а также в аварийных
ситуациях; 3) устанавливать способы повышения
работоспособности машиниста, распределение работы в течение смены, длительность
отдыха в течение смены. 1.4.2. Техническая документация,
поставляемая с экскаватором, должна обладать наглядностью и иллюстративностью с
учетом возможностей человека по восприятию, переработке, усвоению информации и
уровня профессиональной подготовки машинистов; размеры отдельных схем должны
быть удобны для работы в кабине. 2. МЕТОДЫ КОНТРОЛЯ 2.1. Распределение функций между
человеком и машиной при управлении определяют внешним осмотром и по технической
документации, по наличию схем автоматизированного управления отдельными
технологическими операциями, систем регулирования нагрузок, блокировочных
устройств, дистанционного контроля. 2.2. Соответствие требованиям п. 1.1.1.1
проверяют по техническим условиям. 2.3. Требования п. 1.1.2 проверяют в
соответствии с Приложением 2 настоящего стандарта и п. 1.1.6 ГОСТ 27258. Пример
построения картины круговой обзорности для экскаватора ЭГ-15 приведен в
Приложении 2. 2.4. Адекватность СОИ задачам управления
(пп. 1.1.3 и 1.1.11) проверяют внешним осмотром и по
технической документации, содержащей информацию о состоянии оборудования и
механизмов и проверке соответствия СОИ этой информации. Проверяют способы
кодирования информации. Обзорность СОИ определяют по допустимой
величине углов обзора машиниста, заданных в п. 1.1.3 с помощью картин круговой
обзорности (Приложение 2). 2.5. Связь с участниками совместной
работы (п. 1.1.5) оценивают по наличию места для средств связи
с диспетчером. Для экскаваторов вместимостью ковша более 20 м3 проверяют
наличие связи машиниста с обслуживающим персоналом. 2.6. Адекватность реагирования машиниста
при аварийной ситуации оценивают внешним осмотром по наличию аварийных сигналов
(звуковых и световых), аварийных СОИ (п. 1.1.4) и ОУ (п. 1.1.6) и средств
покидания кабины в аварийной ситуации. 2.7. Расположение ОУ в зоне комфорта и
досягаемости (п. 1.1.6) определяют по ГОСТ 27258. Расстояние между ОУ, допустимые величины
их перемещений (п. 1.1.7) определяют с помощью универсальных измерительных
инструментов. Усилия, прилагаемые к рукояткам рычагов
управления (пп. 1.1.8, 1.1.10), измеряют динамометром
в точке, находящейся в середине рукоятки рычага (педали), в направлении
действия руки или ноги. У сельсинных командных аппаратов измерения проводят при
трогании из нейтрального положения и при удержании в
среднем и крайнем положениях. Среднее усилие определяют по результатам трех
измерений. Среднее количество переключений и
перемещений каждого ОУ определяют из числа измерений в течение не менее 10
рабочих циклов. 2.8. Соответствие требованиям пп. 1.1.11 и 1.1.12 проверяют внешним осмотром. 2.9. Соответствие требованиям пп. 1.1.13, 1.1.14, 1.1.15, 1.2.1 определяют с помощью
универсальных измерительных инструментов. 2.10. Внешнюю механическую работу
машиниста (А), кДж, по управлению экскаватором с помощью ручных и ножных ОУ
рассчитывают по формуле
где
n - количество основных
ОУ. 2.11. Удобство рабочей позы оценивают по
величине и длительности отклонения корпуса и конечностей от нормированного
положения. 2.12. Длительность сосредоточенного
наблюдения (п. 1.1.16) определяют как отношение суммарного времени,
затрачиваемого на копание и выгрузку, к продолжительности смены. 2.13. Число объектов преимущественного
(п. 1.1.16) наблюдения определяют путем опроса машинистов. 2.14. Число информационных сигналов (п.
1.1.16) определяют путем суммирования поступающих к машинисту единичных
сигналов. Информационным сигналом считают любую информацию, получаемую
машинистом посредством органов чувств, требующую выполнения ответных действий. 2.15. Монотонность работы машиниста (п.
1.1.16) оценивают по числу приемов за один цикл работы экскаватора и по
длительности циклов. За прием принимают единичные элементы цикла, например,
черпание, поворот, выгрузка и др. Длительность цикла определяют секундомером. 2.16. Темп работы (п. 1.1.16) определяют
числом переключений ОУ за 1 ч. За единичное переключение принимают действие,
выполненное в течение не менее 0,25 с, т.е. за время ответной реакции человека
на управляющее действие. Количество переключений командных аппаратов определяют
путем осциллографирования значений задающих
напряжений или визуально. Количество переключений остальных ОУ определяют
визуально. За число переключений ОУ принимают суммарное количество переключений
всех ОУ. 2.17. Измерение температуры и
относительной влажности воздуха в кабине машиниста (п. 1.2.3) проводят на
высоте 1,5 м (на уровне головы и около стенки кабины) и 0,15 м от пола при
работе экскаватора в течение трех рабочих дней (в период с 12 до 15 ч). Измерение скорости движения воздуха в
кабине проводят на уровне головы машиниста. Среднее арифметическое значение по
результатам 9 измерений температуры, относительной влажности и скорости
движения воздуха сравнивают с нормами. Измерения температуры, скорости движения,
относительной влажности воздуха следует проводить в соответствии с ГОСТ
12.2.106. 2.18. Оценку содержания аэрозолей фиброгенного действия (пыли) в кабине машиниста (п. 1.2.2)
проводят при закрытых окнах и дверях при работающих системах отопления или
кондиционирования. Методы определения содержания пыли - по
ГОСТ 12.1.005. Обработка результатов - по ГОСТ 12.1.016. Содержание пыли определяют в зоне дыхания
машиниста. Отбор проб воздуха проводят при цикличной
работе экскаватора и во время технологических перерывов продолжительностью не
более 10 мин. Воздухоприемное отверстие прибора или
аллонжа с фильтром располагают так, чтобы плоскость всасывания имела угол
наклона 70° - 90° к направлению движения потока запыленного воздуха. 2.19. Соответствие требованиям п. 1.2.4
проверяют по Приложению 3. 2.20. Соответствие требованиям пп. 1.2.5.1 и 1.2.5.2 проверяют по Приложению 4. 2.21. Освещенность пульта управления (п.
1.2.6) измеряют при работе экскаватора, а стола для записи - при включенном
освещении кабины. Светочувствительный элемент устанавливают на рабочую
поверхность пульта управления и на поверхность стола. 2.22. Освещенность зоны объекта (п.
1.2.6) различения измеряют на высоте 0,8 м от уровня забоя в плоскости,
перпендикулярной линии взгляда машиниста. 2.23. Средняя освещенность зоны объекта
различения определяется как среднее арифметическое значений освещенностей
точек, расположенных вдоль проекции оси стрелы на высоте 0,8 м от уровня забоя,
в плоскости, перпендикулярной линии взгляда машиниста. Измерения проводят при
шаге 1 - 5 м в зависимости от типа экскаватора, количество точек измерения
должно быть не менее 5. 2.24. Освещенность зоны под стрелой в
крайней точке черпания (п. 1.2.6) определяют как среднее арифметическое
значений освещенностей в точках пересечения наибольшего радиуса черпания с
продолжением линии правого, левого башмака (гусеницы) и проекции оси стрелы
соответственно на высоте 0,8 м от уровня забоя в плоскости, перпендикулярной
линии взгляда. 2.25. Измерения освещенности проводят в
темное время суток при отношении значений естественной и искусственной
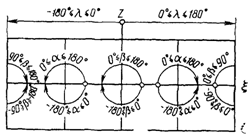
освещенностей не более 0,1. 2.26. Соответствие требованиям пп. 1.3 и 1.4 проверяют внешним осмотром. Приложение 1 Справочное ТЕРМИНЫ, ПРИМЕНЯЕМЫЕ В НАСТОЯЩЕМ СТАНДАРТЕ, И ИХ ПОЯСНЕНИЯ Таблица 3 ──────────────────┬─────────────────────────────────────────────── Термин │ Пояснение ──────────────────┼─────────────────────────────────────────────── Оборудование │ Шкафы управления и пульты управления, │расположенные внутри кабины Постоянное │ По ГОСТ 12.1.006 рабочее место (РМ)│ Объекты │ Ковш, рукоять, стрела, винты, забой при нижнем преимущественного │и верхнем черпании, головной блок, отвал, наблюдения │визуальные помехи остекления Объекты │ Электрический кабель питания, гусеницы, лыжи периодического │механизма шагания, поверхность на уровне наблюдения │стоянки экскаватора, пульты управления, │средства отображения информации, транспортные │средства и самоходные механизмы Область │ Замкнутое пространство, образуемое различными расположения точки│положениями точки зрения при естественных зрения (ОРТЗ) │отклонениях оператора от физиологически │рациональной позы Визуальные помехи│ Все, что мешает обзору за объектами │преимущественного наблюдения Моторное поле │ Пространство рабочего места человека-оператора │с размещенными органами управления, в котором │осуществляются двигательные действия оператора │по управлению системой "человек-машина" Объект различения│ По ГОСТ 12.2.106 Зона объекта │ Поверхность забоя на уровне стоянки различения │экскаватора на участке от 1/3 до 2/3 │наибольшего радиуса копания Перцентиль │ Сотая часть объема измеренной совокупности │людей, которой соответствует определенное │значение антропометрического признака Управляемость, │ По ГОСТ 26387 обслуживаемость, │ осваиваемость │ Обитаемость │ По ГОСТ 20.39.108 Приложение 2 Обязательное МЕТОДЫ КОНТРОЛЯ ОБЗОРНОСТИ Для оценки обзорности строят картины
круговой обзорности из условной точки зрения машиниста, которые представляют
собой плоское отображение сферической картины контуров остекления,
конструктивных элементов машины и объектов наблюдения, форму которых в пространстве
определяют их характерные точки. Картины круговой обзорности выполняют на
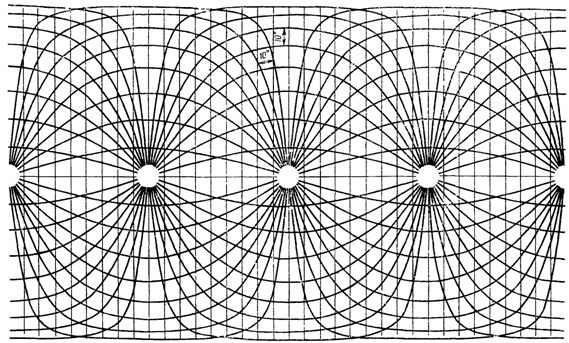
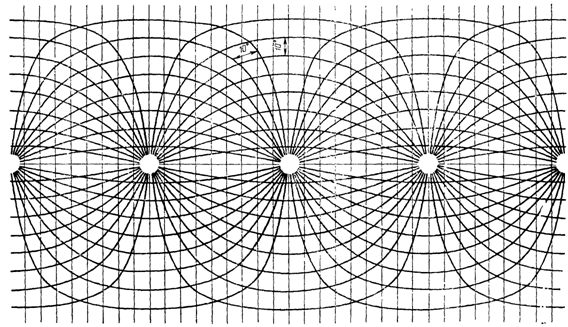
трех тканевых транспарантах. В качестве трехтканевых
транспарантов используют цилиндрические нормальные проекции. Равновеликая
проекция обеспечивает более точное определение площадей, а эквидистантная -
линий (черт. 1, 2). Трехтканевый транспарант в равновеликой проекции. Радиус сферы - 40 мм, угловой шаг - 10°
Черт. 1 Трехтканевый транспарант в эквидистантной проекции. Радиус сферы - 40 мм, угловой шаг - 10°
Черт. 2 Условные точки зрения в области
расположения точки зрения определяют по контрольной точке сиденья SIP с учетом
антропометрических данных операторов (ГОСТ 27250). Для построения картин круговой обзорности
на ортогональном чертеже машины и объектов наблюдения наносят оси прямоугольной
системы координат таким образом, чтобы начало координат совпало с точкой зрения
машиниста, а ось ОУ - с главным лучом зрения машиниста. Затем на каждой проекции
ортогонального чертежа проводят прямые через точку зрения и проекции
характерных точек и измеряют углы
Черт. 3 Затем, пользуясь версорной
схемой (черт. 4), строят характерные точки, для чего на трехтканевом
транспаранте находят и фиксируют точку пересечения двух линий, соответствующих
угловым параметрам точки оригинала. Соединяя в определенной последовательности
линиями характерные точки, выделяя при этом видимые и невидимые линии контура,
получают картину круговой обзорности.
Черт. 4 Для уменьшения количества картин
применяется совмещение положений экскаватора в пространстве относительно
объектов наблюдения. Обзор объектов наблюдения выражается
поверхностью или линией, которые оговариваются заранее. За меру обзора каждого
объекта наблюдения принимают коэффициент обзора Коэффициент обзора поверхности или линии
определяют как отношение площади или линии видимой части объекта к общей его
площади или к длине линии необходимого обзора. Коэффициент обзорности
(
где n, m - количество заданных и
невидимых объектов наблюдения;
Количество положений точки зрения
машиниста зависит от физиологически рациональной рабочей позы. В качестве
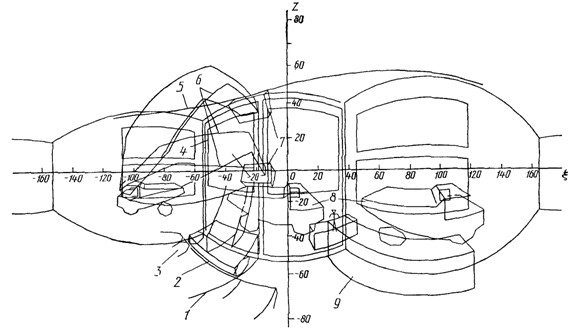
коэффициентов обзорности принимают максимальные обзоры из нескольких положений. Пример построения картины круговой обзорности с рабочего места машиниста экскаватора ЭГ-15 (черт. 5) Экскаватор ЭГ-15
Черт. 5 Начальные условия: машинист ростом 171 см
сидит прямо; погрузка проводится в автомобили "БеЛАЗ". Совмещено - три положения ковша, три
положения автомобилей, положение кабельного барабана. На черт. 5 приняты следующие обозначения: 1, 3 - правая и левая гусеницы; 2 -
кабельный барабан; 4 - окно; 5 - максимальная высота забоя; 6 - стрела; 7 -
ковш; 8 - автомобиль; 9 - пульт управления. Коэффициент обзорности не определен, так
как не приведена обзорность при разных рабочих позах машиниста. Приложение 3 Обязательное МЕТОДИКА ОЦЕНКИ ШУМА 1. Измерения колеблющегося во времени
шума на рабочем месте следует проводить по ГОСТ 12.1.050 и настоящему
стандарту. Допускается автоматизация измерений и применение магнитной записи и
вычислительной техники. Количество измерений при определении максимального
уровня звука должно быть не менее 25. 2. Режим работы экскаватора во время
проведения испытаний - цикличная работа при разработке забоев в соответствии с
требованиями технической документации на экскаваторы с погрузкой горной массы в
транспортные средства или отвал. 3. Поперечный и продольный уклоны рабочей
площади должны быть не более 3° для прямых лопат и 2° - для шагающих
экскаваторов. 4. Окна, двери и другие закрывающиеся
проемы кабины и кузова должны быть закрыты. 5. Во время измерений в кабине должны
быть включены все средства улучшения микроклимата (в зависимости от времени
года) и должно находиться не более двух человек. Микрофон должен быть направлен
в сторону внутреннего бокового окна и располагаться на уровне уха сидящего
машиниста. 6. Измерения шума на рабочем месте
машиниста при наличии двух кабин следует осуществлять в рабочей кабине. 7. Эквивалентный уровень звука,
излучаемый экскаватором в окружающую среду, следует определять в контрольной
точке, расположенной на расстоянии полутора максимальных радиусов черпания от
оси вращения экскаватора по его продольной оси в отработанной части забоя на
высоте 1,5 м от уровня стоянки. Количество измерений должно быть не менее 25. 8. Учет шума помех и атмосферных явлений
следует проводить по ГОСТ 12.1.028. 9. Шумовые характеристики экскаватора
должны быть указаны в технических условиях и формулярах (паспортах)
экскаваторов (далее - в технической документации). Приложение 4 Обязательное МЕТОДИКА ОЦЕНКИ ВИБРАЦИОННЫХ ХАРАКТЕРИСТИК НА РАБОЧЕМ МЕСТЕ МАШИНИСТА Оценка вибрационных характеристик на
рабочем месте машиниста опытных (головных) образцов экскаваторов проводится во
время предварительных и приемочных испытаний, а экскаваторов серийного
производства - во время периодических испытаний. Виды испытаний - по ГОСТ
16504. Организация и проведение испытаний - по ГОСТ 12.1.012. 1. Режим работы экскаватора во время
проведения испытаний - цикличная работа при разработке забоев в соответствии с
требованиями технической документации на экскаваторы с погрузкой горной массы в
транспортные средства или отвал. 2. При наличии на экскаваторе двух кабин
измерения вибрации проводят в рабочей кабине. 3. При измерении вибрации на сиденье
машиниста установку вибропреобразователя проводят в
соответствии с ГОСТ 12.1.012 с помощью диска диаметром ( 4. Измерение вибрации на рукоятках
управления экскаватором проводят в направлении движения руки машиниста.
Установку вибропреобразователя проводят в соответствии
с ГОСТ 12.1.012. Допускается крепление вибропреобразователя
с помощью шпильки, магнита, жесткого хомута, воска и т.п. Во время измерений
руки машиниста должны находиться на рукоятках. 5. Требования к средствам измерения и
контроля вибраций - по ГОСТ 12.4.012. 6. Вибрации на сиденье машиниста следует
измерять в трех взаимно перпендикулярных направлениях прямоугольной системы
координат в соответствии с ГОСТ 12.1.012. 7. Корректированные значения виброускорения измеряют с помощью специальных фильтров или
вычисляют в соответствии с ГОСТ 12.1.012. 8. Длительность измерений вибрационных
характеристик общей вибрации следует определять в зависимости от исследуемого
диапазона частот и от вида применяемых средств измерения (аналоговых или
регистрирующих). Длительность измерения должна соответствовать значениям,
указанным в табл. 4. Таблица 4 ──────────────────────────┬─────────────────────────────────────── Частотный диапазон, Гц │ Длительность измерений вибрационных │ характеристик общей вибрации, с, │ не менее, при применении средств │ измерений ├───────────────────┬─────────────────── │ регистрирующих │ аналоговых ──────────────────────────┼───────────────────┴─────────────────── │ Спектральный анализ До 10 │120 │150 12,5 - 80 │90 │120 ──────────────────────────┼───────────────────┴─────────────────── │ Интегральная оценка 1,4 - 90 │125 │150 Длительность измерения вибрационных
характеристик допускается определять по числу рабочих циклов. Число рабочих
циклов (m) экскаватора рассчитывают по формуле
где t - длительность измерений, с;
9. Допускается автоматизация измерений и
обработки результатов, а также применение магнитной записи и вычислительной
техники. 10. При исполнении экскаватора в варианте
ХЛ измерение вибрационных характеристик дополнительно в зимнее время следует
проводить при температуре ниже минус 40 °С, если
средства виброизоляции расположены вне кабины. 11. В случае применения аналоговых
(стрелочных) приборов мгновенные показания прибора следует фиксировать через
равные промежутки времени 3 - 5 с. Результатом измерения является среднее
арифметическое значение контролируемого параметра. 12. В случае применения регистрирующего
прибора (самописца уровня) результатом измерения является значение
контролируемого параметра, вычисленное одним из следующих способов: способ 1: на участке записи самописца
через промежутки времени, равные 5 с, измеряются ординаты записи. Результатом
измерения является среднее арифметическое значений измеренных ординат; способ 2 (экспресс-способ): на участке
записи следует провести среднюю линию, параллельную оси абсцисс таким образом,
чтобы сумма участков площадей, расположенных под средней линией и заключенных
между ней и кривой записи, равнялась сумме аналогичных площадей, расположенных
под средней линией. Результатом измерения является ордината этой средней линии. 13. Результат измерения локальной
вибрации по корректированному по частоте значению контролируемого параметра
определяют по ГОСТ 12.1.012. 14. Определение представительного
значения вибрационных характеристик 14.1. Значения вибрационных характеристик
в зависимости от объема партии определяют по ГОСТ 12.1.012 и табл. 5 настоящего
стандарта. Таблица 5 ───────────────┬────────┬──────────┬──────────┬───────────┬─────── Объем партии, │До 280 │281 - 500 │501 - 1200│1201 - 3200│3201 шт. │ │ │ │ │ ───────────────┼────────┼──────────┼──────────┼───────────┼─────── Объем выборки │3 │4 │5 │7 │10 ───────────────┼────────┼──────────┼──────────┼───────────┼─────── Контрольный │0,566 │0,617 │0,675 │0,755 │0,828 норматив │ │ │ │ │ 14.2. При установлении вибрационных
характеристик по п. 1.2.5.2 настоящего стандарта в виде спектра контролируемого
параметра (арбитражный метод) в основных полосах частот верхние границы определяют
для каждой октавы (1/3 октавы) и каждой координатной оси. Представительные значения вибрационных
характеристик в каждой частотной полосе определяют по наибольшему значению
параметра вибрации в одном из координатных направлений. Представительное значение вибрационных
характеристик при интегральной оценке равно наибольшему значению параметра
вибрации в одном из координатных направлений. 14.3. Для уникальных экскаваторов,
изготавливаемых малыми партиями (до 30 шт.), представительные значения вибрационных
характеристик допускается определять на одном экскаваторе при работе различных
машинистов. В этом случае при определении представительного значения объем
выборки принимают равным числу машинистов, принявших участие в испытаниях (см.
табл. 5). 14.4. Результаты измерений сравнивают со
значениями, установленными в пп. 1.2.5.1 и 1.2.5.2
настоящего стандарта. 15. Представительные значения
вибрационных характеристик на рабочем месте машиниста или их предельно
допустимые значения вносят в документацию в виде корректированного значения виброускорения или средних квадратических
значений виброскорости или виброускорения
в нормированном диапазоне частот. |

 ,
,