| Утвержден и введен
в действие Постановлением Госстандарта СССР от 25 марта 1985 г. N 785 ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР ДАТЧИКИ ДАВЛЕНИЯ, РАЗРЕЖЕНИЯ И РАЗНОСТИ ДАВЛЕНИЙ С ПНЕВМАТИЧЕСКИМ АНАЛОГОВЫМ ВЫХОДНЫМ СИГНАЛОМ ГСП ОБЩИЕ ТЕХНИЧЕСКИЕ УСЛОВИЯ Pressure, vacuum
and pressure difference transmitters with pneumatic
analog output signal, SSI. General
specifications ГОСТ 22521-85 (СТ СЭВ 2565-80) E Группа П14 ОКП 42 1222 42 1252 Срок действия с 1 июля 1986 года до 1 января 1991 года ИНФОРМАЦИОННЫЕ
ДАННЫЕ 1. Разработан и внесен Министерством
приборостроения, средств автоматизации и систем управления СССР. Разработчики стандарта: И.Д. Бородин
(руководитель темы), А.Я. Юровский, Г.С. Зеленко, С.М. Колкер. 2. Утвержден и введен в действие
Постановлением Государственного комитета СССР по стандартам от 25.03.1985 N
785. 3. Срок проверки - 1993 г.; периодичность
проверки - 5 лет. 4. Стандарт полностью соответствует СТ
СЭВ 2565-80. 5. Взамен ГОСТ 14764-79, ГОСТ 14796-79,
ГОСТ 22521-77. 6. Ссылочные нормативно-технические
документы ──────────────────────────────┬──────────────────────────────────────────── Обозначение НТД, на который │ Номер пункта дана ссылка │ ──────────────────────────────┼──────────────────────────────────────────── ГОСТ 2.601-68 │4.1 ГОСТ 8.001-80 │5.2 ГОСТ 8.009-84 │2.11 ГОСТ 8.383-80 │5.2; 7.1 ГОСТ 26.015-81 │1.10.1 ГОСТ 356-80 │2.13 ГОСТ 2939-63 │2.19 ГОСТ 12997-84 │1.3; 1.4; 1.5; 2.26; 5.5; 6.11; 6.22; 7.3 ГОСТ 13045-81 │6.18 ГОСТ 14192-77 │7.2 ГОСТ 14254-80 │1.3; 6.1 ГОСТ 15150-69 │7.5; 7.6 ГОСТ 17433-80 │1.13.2 ГОСТ 17532-84 │2.1 ГОСТ 25164-82 │2.22 ГОСТ 25165-82 │2.22 7. Срок действия продлен до 01.01.1991
Постановлением Госстандарта СССР от 28.06.1988 N 2483. 8. Переиздание (апрель 1989 г.) с
Изменениями N 1, 2, утвержденными в июне 1988 г., декабре 1988 г. (ИУС 11-88,
4-89). Настоящий стандарт распространяется на
датчики (измерительные преобразователи) давления, разрежения и разности давлений
с пневматическим аналоговым выходным сигналом, а также датчики других
физических величин: расхода жидкостей и газов, уровня и плотности жидкостей,
функционально связанных с давлением или разностью давлений. Датчики входят в комплекс государственной
системы промышленных приборов и средств автоматизации (ГСП) и предназначены для
работы в системах автоматического управления, контроля и регулирования
производственных процессов. Стандарт устанавливает требования к
датчикам, изготовляемым для нужд народного хозяйства и экспорта. (Измененная редакция, Изм. N 1). 1. ИСПОЛНЕНИЯ И
ОСНОВНЫЕ ПАРАМЕТРЫ 1.1. В зависимости от конструктивного
исполнения датчики следует изготовлять в виде: единой конструкции; изделия, состоящего из отдельных
конструктивных блоков. 1.2. В зависимости от возможности
перестройки диапазона измерения датчики подразделяют на однопредельные и
многопредельные (в том числе перенастраиваемые). 1.3. По устойчивости к воздействию
окружающей среды датчики подразделяют на исполнения: защищенное от проникновения пыли,
посторонних тел и воды в соответствии со степенями защиты по ГОСТ 14254-80 и
ГОСТ 12997-84; степень защиты должна быть установлена в технических условиях на
датчики конкретных типов; устойчивое к воздействию агрессивной
среды (коррозионно-стойкое). 1.4. По устойчивости к механическим
воздействиям датчики должны соответствовать одной из следующих групп
исполнений: L1; L2; L3; N 1; N 2; N 3; N 4; V1; V2; V3; V4; V5 - по ГОСТ
12997-84. 1.5. По устойчивости к воздействию
температуры и влажности окружающей среды датчики должны соответствовать
требованиям ГОСТ 12997-84. 1.6. Датчики допускается изготовлять в
сочетании исполнений и групп, перечисленных в пп. 1.2 - 1.5. Отдельные конструктивные блоки датчиков
допускается относить к разным исполнениям и группам по пп. 1.2 - 1.5. 1.7. Верхние пределы измерений или
диапазоны измерений 1.7.1. Верхние пределы измерений или
диапазоны измерений датчиков разрежения следует выбирать из ряда: 0,06; 0,063; 0,10; 0,16; 0,25; 0,40;
0,60; 0,63; 1,0; 1,6; 2,5; 4,0; 6,0; 6,3; 10; 16; 25; 40; 60; 63; 100 кПа. 1.7.2. Верхние пределы измерений или
диапазоны измерений датчиков избыточного давления следует выбирать из ряда: 0,06; 0,063; 0,10; 0,16; 0,25; 0,40;
0,60; 0,63; 1,0; 1,6; 2,5; 4,0; 6,0; 6,3; 10; 16; 25; 40; 60; 63; 100; 160;
250; 400; 600; 630 кПа; 1,0: 1,6; 2,5; 4,0; 6,0; 6,3; 10; 16; 25;
40; 60; 63; 100; 160; 250; 400; 600; 630; 1000 МПа. 1.7.3. Верхние пределы измерений или
диапазоны измерений датчиков абсолютного давления следует выбирать из ряда: 1,0; 1,6; 2,5; 4,0; 6,0: 6,3; 10; 16; 25;
40; 60; 63; 100; 160; 250; 400; 600; 630 кПа; 1,0; 1,6; 2,5; 4,0; 6,0; 6,3; 10;
16 МПа. 1.7.4. Верхние пределы измерений датчиков
избыточного давления-разрежения с одинаковыми по абсолютному значению верхними
пределами измерений избыточного давления и разрежения следует выбирать из ряда: 0,05; 0,08; 0,125; 0,2; 0,3; 0,315; 0,5;
0,8; 1,25; 2,0; 3,0; 3,15; 5,0; 8,0; 12,5; 20,0; 30,0; 31,5; 50,0 кПа. 1.7.5. Верхние пределы измерений
избыточного давления датчиков избыточного давления-разрежения с различающимися
по абсолютному значению верхними пределами измерений избыточного давления и
разрежения следует выбирать из ряда: 60; 150; 300; 500; 530; 900 кПа; 1,5; 2,4
МПа; верхний предел измерения разрежения
должен соответствовать 100 кПа. 1.7.6. Верхние пределы измерений или
диапазоны измерений датчиков разности давлений следует выбирать из ряда: 0,06; 0,10; 0,16; 0,25; 0,40; 0,63; 1,0;
1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа; 1,0; 1,6;
2,5; 4,0; 6,3; 10; 16 МПа. Примечание. Верхние пределы измерений или
диапазоны измерений датчиков, предназначенных для измерения уровня и плотности
(датчики гидростатического давления), могут отличаться от приведенных. 1.7.1 - 1.7.6. (Измененная редакция, Изм.
N 1). 1.7.7. Ряды верхних пределов измерений
или диапазонов измерений, установленные в пп. 1.7.2 - 1.7.6, допускается
продолжать в сторону увеличения и (или) уменьшения, умножая числа данного ряда
на 1.8. Предельно допускаемые рабочие
избыточные давления датчиков разности давлений следует выбирать из ряда: 25; 40; 60; 100; 160; 250; 400; 600 кПа; 1,0; 1,6; 2,5; 4,0; 6,0; 10; 16; 25; 32;
40; 60; 100 МПа. (Измененная редакция, Изм. N 1). 1.9. Любые пределы измерений, диапазоны
измерений (п. 1.7) и предельно допускаемые рабочие избыточные давления (п. 1.8)
допускается выражать в паскалях, килопаскалях, мегапаскалях. 1.10. Выходные сигналы 1.10.1. Выходной сигнал датчиков -
аналоговый 20 - 100 кПа по ГОСТ 26.015-81. (Измененная редакция, Изм. N 1). 1.10.2. Датчик может иметь несколько
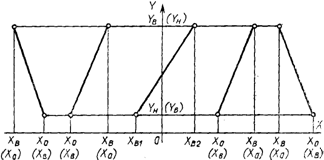
сигналов от одной или нескольких измеряемых величин. 1.11. Номинальная статическая
характеристика датчиков должна быть линейной и соответствовать следующему виду:
где y - текущее значение выходного
сигнала;
k - коэффициент пропорциональности,
который может быть положительным или отрицательным; x - значение измеряемой величины;
Примечание. Значения x и Примеры номинальных статических
характеристик приведены в Приложении 1. (Измененная редакция, Изм. N 1). 1.12. Датчики должны обеспечивать
передачу выходного сигнала по пневматической линии связи внутренним диаметром 4
мм на расстояние 150 м или внутренним диаметром 6 мм на расстояние до 300 м по
трассе. 1.13. Параметры питания 1.13.1. Значение давления воздуха питания
- (140 +/- 14) кПа. (Измененная редакция, Изм. N 1). 1.13.2. Технические характеристики
воздуха питания и классы загрязненности - по ГОСТ 17433-80. Классы загрязненности воздуха питания
должны выбираться из ряда: 0; 1; 2; 3; 4 для групп исполнений В1; В2; В3; В4;
ряда 0, 1; 3 - для групп исполнений С1; С2; С3; С4; Д1; Д2 и Д3. 1.14. Масса не должна превышать: для датчиков абсолютного, избыточного
давления и давления-разрежения - 10 кг; для датчиков разности - 17 кг. Массу датчиков коррозионно-стойких и
взрывозащищенных исполнений устанавливают в технических условиях на датчики
конкретных типов. (Измененная редакция, Изм. N 1). 2. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ 2.1. Датчики должны изготовляться в
соответствии с требованиями настоящего стандарта и технических условий на
датчики конкретных типов по рабочим чертежам, утвержденным в установленном
порядке. Датчики, предназначенные для экспорта,
кроме того, следует изготовлять в соответствии с требованиями ГОСТ 17532-84 и
заказа-наряда внешнеторговой организации. 2.2. Предел допускаемой основной
погрешности 2.2.1. Пределы допускаемой основной
погрешности датчиков, выраженной в процентах от диапазона измерений или
верхнего предела измерений, следует выбирать из ряда: +/- 0,25; +/- 0,4; +/-
0,5; +/- 0,6; +/- 1,0 и +/- 1,5. Для датчиков абсолютного давления с
верхними пределами измерений менее 2,5 кПа, а также датчиков давления,
разрежения и разности давлений с верхними пределами измерений менее 0,25 кПа не
более 250 МПа пределы допускаемой основной погрешности устанавливают в
технических условиях на датчики конкретных типов. (Измененная редакция, Изм. N 1). 2.2.2. Допускается устанавливать разные
значения 2.2.3. Пределы допускаемой основной
погрешности многопредельных датчиков допускается устанавливать различными в
зависимости от предела (или диапазона) измерения. 2.2.4. Допускается в технических условиях
на датчики конкретного типа предел допускаемой основной погрешности указывать в
единицах измерения давления, единицах измерения выходного сигнала или в
процентах диапазона изменения выходного сигнала. При этом указанные значения
погрешности должны соответствовать значению, выраженному в процентах от
верхнего предела измерения или диапазона измерения, выбранного из ряда,
приведенного в п. 2.2.1. Соотношение между погрешностями,
выраженными различными способами, приведено в справочном Приложении 2. (Измененная редакция, Изм. N 1). 2.2.5. При необходимости, по согласованию
между потребителем и изготовителем, нормируются систематическая и случайная составляющие
основной погрешности. 2.3. Вариация выходного сигнала не должна
превышать абсолютного значения предела допускаемой основной погрешности Для датчиков, у которых нормированы
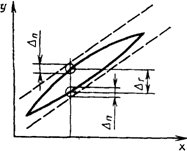
различные значения 2.4. Наибольшее отклонение действительной
характеристики преобразования Примечание. Отклонение действительной
характеристики преобразования от установленной зависимости включает погрешность
нелинейности выходного сигнала Виды характеристик преобразования
приведены в справочном Приложении 3. (Измененная редакция, Изм. N 1). 2.5. Зона нечувствительности датчиков со
значением Для датчиков со значением 2.6. Пульсация выходного сигнала должна
быть установлена в технических условиях на датчики конкретных типов. 2.7. Дополнительная погрешность,
вызванная воздействием вибрации (п. 1.4), и допустимые направления воздействия
вибрации должны быть установлены в технических условиях на датчики конкретных
типов. 2.8. Изменение выходного сигнала датчиков
разности давлений, вызванное изменением рабочего избыточного давления, должно
быть установлено в технических условиях на датчики конкретных типов. Изменение выходного сигнала следует
нормировать при изменении рабочего избыточного давления на заданный интервал
значений при любых давлениях от 0 до предельно допускаемого. (Измененная редакция, Изм. N 1). 2.9. Изменение выходного сигнала датчиков
абсолютного давления, вызванное изменением атмосферного давления на +/- 10 кПа
(75 мм рт. ст.) от установившегося значения в пределах от 84 до 106,7 кПа (от
630 до 800 мм рт. ст.), должно быть установлено в технических условиях на
датчики конкретных типов. 2.10. Дополнительные погрешности,
вызванные изменением влияющих величин, выраженные в той же размерности, что и
основная погрешность по п. 2.2, не должны превышать значений, указанных в табл.
1. Таблица 1 ──────────────────┬──────────────────────────────────────────────────────── Предел допускаемой│ Дополнительная погрешность, %, вызванная основной ├──────────────────────────┬───────────────────────────── погрешности, % │ изменением температуры │отклонением давления воздуха │ окружающего воздуха на │ питания от его номинального │ каждые 10 °C │ значения на +/- 14 кПа ──────────────────┼──────────────────────────┼───────────────────────────── +/- 0,25 │ +/- 0,25 │ +/- 1,0 +/- 0,40 │ +/- 0,35 │ +/- 0,50 │ +/- 0,45 │ +/- 0,60 │ +/- 0,50 │ +/- 1,0 │ +/- 0,60 │ +/- 1,5 │ +/- 0,75 │ Для датчиков с перенастраиваемым
диапазоном измерения указанные значения дополнительных погрешностей относятся к
наибольшему диапазону или наибольшему верхнему пределу измерений. Значения
дополнительных погрешностей для других диапазонов или верхних пределов
измерений должны быть установлены в технических условиях на датчики конкретных
типов. Дополнительную погрешность, вызванную
изменением температуры окружающего воздуха на каждые 10 °C, допускается
нормировать раздельно по изменению выходного сигнала, соответствующего
начальному значению, и по диапазону изменения выходного сигнала. (Измененная редакция, Изм. N 1). 2.11. Динамические характеристики
датчиков должны нормироваться: переходной характеристикой при
скачкообразном изменении измеряемой величины, составляющем 10% диапазона
измерения; временем установления выходного сигнала
при скачкообразном изменении измеряемой величины, составляющем 90% диапазона
измерения; максимальным отклонением выходного
сигнала при скачкообразном изменении измеряемой величины, составляющем 90%
диапазона измерения. Конкретные значения динамических
характеристик устанавливают в технических условиях на датчики конкретных типов. Примечания. 1. Допускается нормировать
другие динамические характеристики, установленные ГОСТ 8.009-84. 2. Для датчиков, относящихся к линейным
динамическим звеньям, допускается нормировать только переходную характеристику. 2.12. Датчики избыточного давления,
разрежения, давления-разрежения, абсолютного давления (далее - датчики давления
и разрежения) должны быть прочными и герметичными при давлениях, указанных в
табл. 2. Таблица 2 ─────────────────────────────┬─────────────────────┬─────────────────────── Наименование датчиков │ Верхние пределы │Испытательное давление, │ измерений, МПа │ % от верхнего предела │ │ измерений ─────────────────────────────┼─────────────────────┼─────────────────────── Датчики давления-разрежения │Все пределы измерений│ 125 (по избыточному давлению) │ │ ─────────────────────────────┼─────────────────────┼─────────────────────── Датчики разрежения │ До 0,06 │ 125 ─────────────────────────────┼─────────────────────┼─────────────────────── Датчики избыточного давления│ До 10 │ 125 ├─────────────────────┼─────────────────────── │ От 16 до 60 │ 115 ├─────────────────────┼─────────────────────── │ От 100 до 160 │ 110 ├─────────────────────┼─────────────────────── │ От 250 до 1000 │ 105 ─────────────────────────────┼─────────────────────┼─────────────────────── Датчики абсолютного давления│ 0,1 и более │ 125 Датчики абсолютного давления с верхним
пределом измерения менее 0,1 МПа должны быть прочными и герметичными при
атмосферном давлении. Датчики разрежения с верхним пределом
измерения 0,1 МПа, датчики избыточного давления-разрежения с верхними пределами
измерений избыточного давления не более 0,15 МПа и датчики абсолютного давления
с верхними пределами измерений не более 0,25 МПа должны быть герметичными при
абсолютном давлении не более 0,13 кПа. (Измененная редакция, Изм. N 1). 2.13. Датчики разности давлений должны
выдерживать испытание на прочность пробным давлением по ГОСТ 356-80 и на
герметичность предельно допускаемым рабочим избыточным давлением по п. 1.8, при
этом за условное давление 2.14. Датчики давления и разрежения
должны выдерживать воздействия: выключения давления питания на 30 мин; перегрузки испытательным давлением по п.
2.12 в течение 15 мин. Через 4 ч после окончания указанных
воздействий датчики должны соответствовать требованиям пп. 2.2 и 2.3. 2.15. Датчики разности давлений должны
выдерживать воздействия: выключения давления питания на 30 мин; перегрузки со стороны плюсовой камеры
давлением в 1,25 раза большим, чем предельная номинальная разность давлений, в
течение 15 мин. Через 4 ч после окончания указанных
воздействий датчики должны соответствовать требованиям пп. 2.2 и 2.3. 2.16. Датчики разности давлений,
защищенные от воздействия односторонней перегрузки давлением, равным предельно
допускаемому рабочему избыточному давлению, должны выдерживать перегрузку со
стороны плюсовой и минусовой камер в течение 1 мин односторонним воздействием
давления, равного предельно допускаемому рабочему давлению. Через 12 ч после воздействия перегрузки
датчики должны соответствовать требованиям пп. 2.2 и 2.3. Допускается корректировка выходного
сигнала. 2.17. Датчики должны выдерживать
воздействие переменного давления или разрежения, изменяющегося от 20 - 30 до 70
- 80%, но не более 50% верхнего предела измерения, со следующим числом циклов: 20000 - с верхним пределом измерения до 25 МПа; 15000 " " " " " 40, 60 МПа; 10000 " " " " " 100, 160 МПа. Для датчиков с верхними пределами
измерения свыше 160 МПа и для датчиков абсолютного давления число циклов и
диапазон изменения давления устанавливают в технических условиях на датчики
конкретных типов. (Измененная редакция, Изм. N 1). 2.18. Материалы деталей датчиков,
соприкасающихся с измеряемой средой, должны быть указаны в технических условиях
на датчики конкретных типов. 2.19. Расход воздуха питания, приведенный
к условиям ГОСТ 2939-63, в установившемся режиме работы датчика не должен
превышать 5 л/мин. 2.20. Расход воздуха на выходе датчика,
характеризующий мощность его выходного сигнала, должен быть указан в
технических условиях на датчики конкретных типов и быть не менее 15 л/мин. 2.21. Габаритные монтажные и
присоединительные размеры датчиков должны быть указаны в технических условиях
на датчики конкретных типов. 2.22. Элементы датчиков, предназначенные
для присоединения к ним внешних гидравлических, газовых и пневматических линий,
и ряды их присоединительных размеров - по ГОСТ 25164-82 и ГОСТ 25165-82. Для датчиков, предназначенных для
измерения давления или разности давлений агрессивных сред, затвердевающих
(кристаллизирующихся) и засоренных сред, образующих осадок, сред с вязкостью
более 1 Па x с (10 П), а также разреженного газа допускается применять другие
элементы соединений с импульсными линиями. 2.23. Средняя наработка на отказ должна
быть не менее 67000 - 100000 ч для датчиков с верхним пределом измерений до 100
МПа. Средняя наработка на отказ для датчиков с
верхними пределами измерений свыше 100 МПа, а также датчиков, работающих в
агрессивных средах, должна быть указана в технических условиях на датчики
конкретных типов. 2.24. Полный средний срок службы - не
менее 12 лет для датчиков с верхним пределом измерения до 100 МПа. Для датчиков с верхним пределом измерений
свыше 100 МПа, а также датчиков, работающих в агрессивных средах, с естественно
ограниченным сроком службы полный средний срок службы устанавливают в
технических условиях на датчики конкретных типов. 2.25. Ремонтопригодность должна быть
установлена в технических условиях на датчики конкретных типов в соответствии с
требованиями нормативно-технической документации, утвержденной в установленном
порядке. 2.23 - 2.25. (Измененная редакция, Изм. N
1). 2.26. Датчики в упаковке для
транспортирования должны выдерживать воздействие транспортной тряски,
температуры и влажности окружающего воздуха по ГОСТ 12997-84. 2.27. Установленная безотказная наработка
должна быть не менее 7000 - 10000 ч для датчиков с верхним пределом измерений
до 100 МПа. Установленную безотказную наработку для
датчиков с верхним пределом измерений свыше 100 МПа, а также датчиков,
работающих в агрессивных средах, устанавливают в технических условиях на
датчики конкретных типов. (Введен дополнительно, Изм. N 1). 2.28. Комплектность устанавливается в
технических условиях на датчики конкретных типов. (Введен дополнительно, Изм. N 2). 3. ТРЕБОВАНИЯ
БЕЗОПАСНОСТИ 3.1. Источником опасности при монтаже и
эксплуатации датчиков является избыточное давление. 3.2. Безопасность эксплуатации датчиков
должна быть обеспечена: прочностью и герметичностью измерительных
камер, которые должны соответствовать нормам, установленным в пп. 2.12 и 2.13; надежным креплением датчиков при монтаже
на объекте. 3.3. Замена, присоединение и отсоединение
датчика от магистралей, подводящих измеряемую среду, должно производиться при
отсутствии избыточного давления в магистралях. 3.4. Эксплуатация изделия разрешается при
наличии инструкции по технике безопасности, утвержденной руководителем
предприятия-потребителя и учитывающей специфику применения изделия в конкретном
технологическом процессе. Разд. 4. (Исключен, Изм. N 2). 5. ПРАВИЛА ПРИЕМКИ 5.1. Для проверки соответствия датчиков
требованиям настоящего стандарта следует проводить государственные испытания,
приемосдаточные, периодические и типовые испытания, а также контрольные
испытания на надежность. 5.2. Порядок проведения государственных
контрольных испытаний - по ГОСТ 8.001-80, ГОСТ 8.383-80. 5.3. При приемосдаточных испытаниях
каждый датчик проверяют на соответствие требованиям пп. 2.2; 2.3; 2.6; 2.8;
2.9; 2.12; 2.13; 7.1 и 7.2. Допускается не проводить проверку
датчиков на соответствие требованиям: п. 2.3, если указанное в технических
условиях на датчики конкретных типов значение вариации составляет менее 0,5
абсолютного значения допускаемой основной погрешности; пп. 2.8, 2.12 и 2.13, если проверка
проведена в измерительном блоке; п. 2.9, если необходимость проверки по
этому пункту не оговорена в технических условиях на датчики конкретных типов. В технических условиях на датчики
конкретных типов устанавливают наибольшее значение вероятности приемки датчика
с погрешностью, превышающей Последовательность проведения испытаний
устанавливают в технических условиях на датчики конкретных типов. Перед приемосдаточными испытаниями каждый
датчик должен проходить технологическую приработку. Объем и продолжительность приработки
должны быть установлены в технических условиях на датчики конкретных типов. Если в процессе испытания будет
обнаружено несоответствие проверяемого датчика хотя бы одному предъявляемому
требованию, то датчик признают не выдержавшим испытания. Решение о целесообразности проведения
повторных испытаний в полном объеме принимается в каждом конкретном случае.
Допускается повторно подвергать датчики приемосдаточным испытаниям только по
пунктам несоответствия и пунктам, по которым приемосдаточные испытания не
проводились. Результаты повторных испытаний являются окончательными. (Измененная редакция, Изм. N 1, 2). 5.4. Периодические испытания 5.4.1. Периодические испытания датчиков
проводят не реже одного раза в год. Испытания допускается не проводить, если в
указанный промежуток времени проводились государственные контрольные испытания.
Датчики проверяют на соответствие требованиям, указанным в п. 5.3 (включая п.
2.3), а также требованиям пп. 1.3 (кроме устойчивости к воздействию агрессивной
среды и защищенности от проникания пыли и посторонних тел), 1.4, 2.4, 2.5, 2.7,
2.10, 2.14 - 2.17, 2.20, 2.25. 5.4.2. Для проведения периодических
испытаний отбирают по три датчика от каждой однотипной группы датчиков или по
три датчика каждого типового представителя, прошедших приемосдаточные испытания.
Группы или типовые представители датчиков устанавливают в технических условиях
на датчики конкретных типов. 5.4.1, 5.4.2. (Измененная редакция, Изм.
N 1). 5.4.3. Если в процессе испытаний будет
обнаружено несоответствие предъявляемым требованиям хотя бы у одного из
датчиков, то испытания проводят на удвоенном числе датчиков. В этом случае
допускается проводить проверку в сокращенном объеме, но обязательно по пунктам
несоответствия. Результаты повторных испытаний считают окончательными. 5.5. Типовые испытания - по ГОСТ
12997-84. 5.6. Испытания на безотказность следует
проводить один раз на опытных образцах или первой промышленной партии по
нормативно-технической документации, утвержденной в установленном порядке. 5.7. Динамические характеристики подтверждаются
на основании испытаний опытных образцов или образцов-аналогов. В случаях внесения в конструкцию датчика
изменений, которые могут повлиять на динамические характеристики, последние
проверяют при типовых испытаниях. 5.6, 5.7. (Измененная редакция, Изм. N
1). 6. МЕТОДЫ ИСПЫТАНИЙ 6.1. Методика проведения испытаний
датчиков на воздействие пыли и воды (п. 1.3) - по ГОСТ 14254-80. 6.2. Испытания проводят при следующих
условиях: рабочее положение - в соответствии с
техническими условиями на датчики конкретных типов; температура окружающего воздуха: для испытаний по пп. 2.2 и 2.3 должна
быть (23 +/- 2) °C; для остальных испытаний - в пределах от
10 до 35 °C, в течение одного испытания температура не должна изменяться более
чем на +/- 2 °C; выдержка датчика при установленной
температуре - не менее 2 ч; относительная влажность от 30 до 80%; атмосферное давление от 84 до 106,7 кПа
(от 630 до 800 мм рт. ст.); для датчиков абсолютного давления
изменение атмосферного давления устанавливают в технических условиях на эти
датчики; отклонение давления воздуха питания от
его номинального значения не должно превышать: +/- 1% - для датчиков с пределом
допускаемой основной погрешности +/- 0,25; +/- 0,40; +/- 0,50; +/- 2% - для датчиков с пределом
допускаемой основной погрешности +/- 0,60; +/- 1,0; +/- 1,5; расход воздуха на выходе датчика должен
отсутствовать; вибрация, тряска, удары, наклоны,
влияющие на работу датчиков, должны отсутствовать; пульсация выходного сигнала не должна
превышать значения зоны нечувствительности, допускается подключение в линию
выходного сигнала дополнительной емкости, снижающей пульсацию; выдержка датчика перед началом испытаний
после включения питания должна быть не менее 30 мин; измеряемая среда: для датчиков с верхними пределами
измерения до 2,5 МПа - воздух или другой газ; для датчиков с верхними пределами
измерения более 2,5 МПа - жидкость или газ; в обоснованных случаях допускается
использовать жидкости для проверки датчика с верхними пределами измерения от
0,25 до 2,5 МПа; при проверке датчиков разности давлений
номинальное значение измеряемого параметра устанавливают при сообщении
минусовой камеры с атмосферой и подачей соответствующего избыточного давления в
плюсовую камеру; допускается вместо сообщения с атмосферой подача опорного
давления, задатчика; выходной сигнал, соответствующий нижнему
предельному значению измеряемого параметра, должен быть установлен на 0,2 кПа
после выдержки датчика при включенном питании, подачи и сброса давления в
режимах, установленных в технических условиях на датчики конкретных типов; скорость изменения давления и (или)
выдержка при контролируемом давлении должны быть установлены в технических
условиях на датчики конкретных типов; влияние внешних факторов (пп. 2.7 и 2.10)
следует определять, исключив при этом все другие влияния, кроме определяемого,
при значениях измеряемой величины или соответствующих ей значениях выходного
сигнала, указанных в технических условиях на датчики конкретных типов. 6.3. Определение основной погрешности (п.
2.2) и вариации (п. 2.3) следует проводить одним из следующих способов: установкой по образцовому прибору
номинальных значений измеряемой величины на входе датчика и измерением по
другому образцовому прибору выходного сигнала датчика; установкой по образцовому прибору
номинального значения выходного сигнала датчика и измерением по другому
образцовому прибору значения измеряемой величины; сравнением выходных сигналов проверяемого
и образцового датчиков. Основную погрешность определяют как
максимальное отклонение действительных значений от расчетных. При приемосдаточных испытаниях основную
погрешность определяют по результатам измерений в течение одного цикла
нагружения не менее чем при пяти значениях измеряемой величины, достаточно
равномерно распределенных в диапазоне измерений, включая граничные значения
диапазона измерения. При периодических испытаниях основную
погрешность определяют по результатам измерений в течение пяти циклов
нагружения за 24 ч. При этом первые две проверки следуют непосредственно одна
за другой, третью проверку проводят через 2 ч после второй, четвертую - через 4
ч после третьей, а пятую - через 18 ч после четвертой. При нормировании характеристик
систематической и случайной составляющих основной погрешности методы их
проверки устанавливают в технических условиях на датчики конкретных типов. Вариацию выходного сигнала определяют как
разность между значениями или средними значениями выходного сигнала,
соответствующими одному и тому же значению измеряемой величины, полученными
отдельно при прямом и обратном ходе. При проверке сравнением выходных сигналов
проверяемого и образцового датчиков вариацию выходного сигнала определяют как
разность между погрешностью на прямом ходе и погрешностью на обратном ходе при
значениях измеряемой величины, отличающихся не более чем на 5%. 6.4. Отклонение действительной
характеристики преобразования от установленной зависимости (п. 2.4) следует
определять при периодических испытаниях при многократных (не менее пяти),
следующих одна за другой проверках датчиков при изменении входного сигнала от
меньших значений к большим и от больших значений к меньшим в пределах
установленного диапазона измерения. Значение отклонения Погрешность нелинейности Вариацию выходного сигнала Повторяемость выходного сигнала При оценке повторяемости выходного
сигнала допускается не учитывать 5% всех результатов измерений. Примеры и методика определения значений 6.3, 6.4. (Измененная редакция, Изм. N
1). 6.5. Зону нечувствительности (п. 2.5)
следует проверять при двух приведенных значениях выходного сигнала: в интервале
20 - 40 и 70 - 90% диапазона его изменения. Установив одно из значений
выходного сигнала, изменяют значение в какую-либо сторону на значение
нормируемой зоны нечувствительности. Затем измеряемое значение изменяют в
обратную сторону на ту же величину зоны нечувствительности. В обоих случаях при изменении измеряемого
значения выходной сигнал должен измениться в соответствующую сторону. При пульсации выходного сигнала,
превышающей значение зоны нечувствительности, допускается подключение в линию
выходного сигнала дополнительной емкости, снижающей пульсацию. 6.6. Проверку пульсации выходного сигнала
(п. 2.6) проводят при значениях 20 и 100 кПа или близким к ним значениям по
образцовому манометру с верхним пределом измерения 100 кПа, установленному на
конце пневматической линии длиной 4 м с внутренним диаметром трубки 4 мм. К пневматической
линии допускается подсоединять дополнительную емкость не более 160 см3. Допускаются другие методы проверки
пульсации выходного сигнала. 6.7. Испытание датчиков на воздействие
механических факторов (пп. 2.7, 1.4) проводят одновременно или последовательно
по трем взаимно перпендикулярным направлениям, если иное не оговорено в
технических условиях. Датчики, имеющие одно (два) рабочее
положение, испытывают в этом (этих) положении. Допускается испытывать датчики в
двух (одном) других взаимно перпендикулярных положениях по отношению к рабочему
положению. Необходимость проведения испытаний и требования к испытаниям в этих
положениях указывают в технических условиях, при этом изменение положения
рассматривают как изменение направления воздействия механических факторов. Контрольную точку выбирают на платформе
стенда или на промежуточном крепежном приспособлении возможно ближе к одной из
точек крепления. В технически обоснованных случаях по согласованию с заказчиком
допускается выбирать контрольную точку непосредственно на датчике при условии,
что будет обеспечен объективный контроль параметров испытательного режима. В
этом случае положение контрольной точки указывают в технических условиях.
Датчики считают выдержавшими испытания, если они удовлетворяют требованиям пп.
2.7 и 1.4. 6.8. Проверку изменения выходного сигнала
датчиков разности давления при изменении рабочего избыточного давления (п. 2.8)
проводят следующим образом: при нулевом значении разности давления корректором
нуля или другим способом устанавливают начальное приведенное значение выходного
сигнала, которое указывают в технических условиях на датчики конкретных типов. Плавно повышая рабочее избыточное
давление одновременно в обеих камерах от нуля до предельно допускаемого
значения и снижая его затем от предельно допускаемого значения до нуля,
определяют изменение выходного сигнала при изменении рабочего избыточного
давления на заданный интервал, значение которого устанавливают в технических
условиях на датчики конкретных типов. Изменение выходного сигнала не должно
превышать значений, указанных в п. 2.8. (Измененная редакция, Изм. N 1). 6.9. Проверку изменения выходного сигнала
датчиков абсолютного давления при изменении атмосферного давления (п. 2.9)
проводят в барокамере: при одном фиксированном значении
измеряемого давления; при значении давления окружающего
воздуха, равном атмосферному; при изменении давления окружающего
воздуха от указанного на +/- 10 кПа (75 мм рт. ст.). 6.10. Влияние воздействия повышенной
(пониженной) температуры окружающего воздуха (табл. 1) определяют следующим
образом: датчик помещают в камеру тепла (холода),
включают и проверяют погрешность по методике, приведенной в п. 6.3, при
условиях, указанных в п. 6.2, один раз или три раза непосредственно один за
другим; повышают (понижают) температуру в камере
до предельного значения соответствующей группы (п. 1.5), выдерживают датчик при
этой температуре в течение не менее 2 ч и проверяют один или три раза непосредственно
один за другим; допускаемое отклонение температуры в камере +/- 3 °C; понижают (повышают) температуру до
первоначального значения и, после выдержки датчика при этой температуре в
течение не менее 2 ч, вновь проверяют его погрешность один или три раза
непосредственно один за другим; допускаемая разность температур между первыми и
последними тремя проверками +/- 3 °C. В течение всего процесса испытаний датчик
должен находиться во включенном состоянии. Все проверки проводят без перестановки
датчика. Корректировка выходного сигнала
допускается только перед первой проверкой. Число проверок при заданной температуре
устанавливают в технических условиях на датчики конкретных типов. Дополнительную погрешность определяют: при однократной проверке - как разность
между значениями погрешностей или выходного сигнала, полученными при измерении
при предельной температуре и средним значением двух измерений при температуре,
указанной в п. 6.2; при трехкратной проверке - как разность
между средними значениями погрешностей или выходного сигнала, полученными при
трех измерениях при предельной температуре, и средними значениями шести
измерений при температуре, указанной в п. 6.2. При разности температур нормальной (п.
6.2) и предельной (п. 1.5) менее 20 °C определяют значение погрешности при
предельной температуре, которое не должно превышать суммы пределов основной и
дополнительной погрешностей. (Измененная редакция, Изм. N 1). 6.11. Влияние воздействия повышенной
влажности (п. 1.5) определяют по методике ГОСТ 12997-84 в течение 48 ч. Допускается выдерживать датчик между
проверками в термовлагокамере в выключенном состоянии. Датчик считают выдержавшим испытание,
если на его внешних и внутренних деталях не обнаружено коррозии, отслаивания и
повреждения защитных покрытий, нарушающих работоспособность и ухудшающих
внешний вид; погрешность не должна превышать суммы допускаемой основной и
дополнительной погрешности от воздействия температуры. 6.12. Влияние изменения давления воздуха
питания (табл. 1) следует проверять при двух значениях выходного сигнала,
составляющих 20 - 40 и 70 - 90% диапазона его изменения. Установив выходной сигнал при давлении
воздуха питания 140 кПа, определяют его значение при давлении 126 и 154 кПа.
Изменение выходного сигнала подсчитывают как разность между выходным сигналом
при давлении воздуха 140 кПа и выходными сигналами при давлениях воздуха
питания 126 и 154 кПа. Дополнительная погрешность не должна
превышать значений, указанных в п. 2.10. 6.13. Динамические характеристики
датчиков (п. 2.11) определяют по экспериментально полученным характеристикам
переходного процесса при входных скачкообразных возмущениях, вызванных сбросом
или набором измеряемой величины. Перед созданием возмущений при
скачкообразном сбросе измеряемой величины до значения, соответствующего
выходному сигналу 20 кПа, допускается проводить корректировку выходного сигнала
в сторону его увеличения на 0,1 диапазона изменения выходного сигнала. Динамические характеристики определяют
при нормальных условиях, длине пневматической линии на выходе преобразователя
(3,5 +/- 0,5) м с внутренним диаметром 6 мм и подсоединенной на конце линии
емкости 160 см3. Среда (жидкость, газ), на которой проводят испытания, должна
быть указана в технических условиях на датчики конкретных типов. Для датчиков разности давлений в качестве
измеряемой среды используют воздух. (Измененная редакция, Изм. N 1). 6.14. Методика проверки датчиков на
прочность и герметичность (пп. 2.12, 2.13) должна быть установлена в
технических условиях на датчики конкретных типов. 6.15. Проверку датчиков на воздействие
выключения давления питания и перегрузки (пп. 2.14; 2.15) следует проводить
следующим образом: датчик с включенным давлением питания выдерживают в течение
15 мин под давлением, указанным в пп. 2.12 или 2.13. Снизив давление до значения,
соответствующего верхнему пределу измерения (для датчиков давления-разрежения -
верхнему пределу измерения избыточного давления), выдерживают датчик при этом
давлении в течение 30 мин при выключенном давлении питания. Снизив измеряемое давление до нижнего
предельного значения, включают датчик и проверяют его по методике, приведенной
в п. 6.3. Если датчик соответствует требованиям пп. 2.2 и 2.3, испытание
прекращают и датчик считают выдержавшим испытание. Если датчик не соответствует требованиям
пп. 2.2 и 2.3, необходимо выдержать его в течение 4 ч и снова испытать по
способам, приведенным в п. 6.3. Результаты повторных испытаний считают
окончательными. 6.16. Проверку датчиков разности давлений
на влияние одностороннего воздействия рабочего избыточного давления (п. 2.16)
следует проводить поочередной подачей указанного давления сначала в минусовую,
а затем в плюсовую камеры и выдержкой датчика в обоих случаях под давлением в
течение 1 мин. Датчик подвергают перегрузкам, как
указано выше, три раза. После выдержки без давления в течение 12
ч и корректировки выходного сигнала датчик должен соответствовать требованиям
пп. 2.2 и 2.3. Допускается, в обоснованных случаях,
сокращение времени выдержки. 6.17. Проверку датчиков на воздействие
переменного давления (п. 2.17) проводят на установке, создающей переменное
давление в пределах, указанных в п. 2.17, и изменяющееся за 0,1 с не более чем
на 10% диапазона измерения давления (разности давления). После воздействия переменного давления и
корректировки выходного сигнала датчик должен соответствовать требованиям пп.
2.2 и 2.3. Допускается проводить испытания на
представительных типоразмерах датчиков. Представительные типоразмеры указывают
в технических условиях на датчики конкретных типов. 6.18. Расход воздуха питания (п. 2.19)
определяют ротаметром по ГОСТ 13045-81, установленным в линию воздушного
питания датчика, при двух крайних и одном промежуточном значениях диапазона
изменения выходного сигнала. При этом не должно быть расхода воздуха в линии
выходного сигнала. Для определения расхода воздуха Q, л/мин,
приведенного к давлению 101,3 кПа и температуре 20 °C, показания ротаметра
Погрешность измерения расхода не должна
превышать 10% измеряемого. 6.19. Расход воздуха на выходе датчика
(п. 2.20) определяют при верхнем предельном значении измеряемой величины по
ротаметру, установленному в линию отвода выходного сигнала. Выходной штуцер
ротаметра должен быть сообщен с атмосферой. Длина линии связи между датчиком и
ротаметром не должна превышать 1 м при внутреннем диаметре трубки не менее 4
мм. Значение расхода воздуха должно быть не менее установленного в технических
условиях на датчики конкретных групп. 6.20. Габаритные и присоединительные
размеры датчиков (п. 2.21) следует проверять измерением и сравнением
результатов с размерами, указанными в конструкторской документации на датчик. Габаритные размеры определяют на опытных
образцах и при типовых испытаниях. Проверку массы датчиков (п. 1.14)
проводят путем взвешивания. 6.21. Методы проведения контрольных
испытаний на безотказность (пп. 2.23 и 2.27) - по нормативно-технической
документации, утвержденной в установленном порядке. 6.20, 6.21. (Измененная редакция, Изм. N
1). 6.22. Методы испытаний датчиков в
упаковке для транспортирования на устойчивость к воздействию транспортной
тряски, температуры и влажности окружающего воздуха (п. 2.26) - по ГОСТ
12997-84. 6.23. Маркировку и упаковку (пп. 7.1 -
7.3) следует проверять внешним осмотром на соответствие техническим условиям на
датчики конкретных типов. (Измененная редакция, Изм. N 1). 7. МАРКИРОВКА,
УПАКОВКА, ТРАНСПОРТИРОВАНИЕ И ХРАНЕНИЕ 7.1. На корпусе датчика или прикрепленной
к нему табличке должны быть нанесены: товарный знак или наименование
предприятия-изготовителя; наименование и (или) тип датчика; исполнение датчика; год выпуска; знак Госреестра по ГОСТ 8.383-80; государственный Знак качества, присваиваемый
в установленном порядке; пределы измерения (с указанием единиц
измерения); предельно допускаемое рабочее избыточное
давление для датчиков разности давлений; параметры питания; верхнее и нижнее предельные значения
выходного сигнала. Допускается указывать другие данные,
характеризующие датчик, а также применять условные обозначения и сокращения. Для малогабаритных датчиков допускается
знак Госреестра, государственный Знак качества, пределы измерения, параметры
питания, верхнее и нижнее предельные значения выходного сигнала указывать
только в эксплуатационной документации. 7.2. Транспортная маркировка - по ГОСТ
14192-77. На транспортной таре должны быть нанесены
несмываемой краской основные, дополнительные и информационные надписи, а также
манипуляционные знаки: "Осторожно, хрупкое", "Верх, не
кантовать", "Боится сырости". 7.3. Упаковка датчиков должна
соответствовать требованиям ГОСТ 12997-84 и техническим условиям на датчики
конкретных типов. 7.4. Датчики в упаковке следует
транспортировать любым видом транспорта в крытых транспортных средствах в
соответствии с правилами, действующими на каждом виде транспорта. При транспортировании датчиков воздушным
транспортом их следует помещать в отапливаемые герметизируемые отсеки
самолетов. 7.5. Условия транспортирования - по
условиям хранения 5 ГОСТ 15150-69. 7.6. Датчики следует хранить в упаковке
предприятия-изготовителя по условиям хранения 3 ГОСТ 15150-69. Воздух помещения, в котором хранят
датчики, не должен содержать коррозионно-активных веществ. 8. ГАРАНТИИ
ИЗГОТОВИТЕЛЯ 8.1. Изготовитель должен гарантировать
соответствие датчиков требованиям настоящего стандарта и технических условий на
датчики конкретных типов при соблюдении условий эксплуатации, транспортирования
и хранения. 8.2. Гарантийный срок эксплуатации
датчиков - 18 мес со дня ввода их в действие; для датчиков, устойчивых к
воздействию агрессивной среды с естественно ограниченным сроком службы, - по
техническим условиям на эти датчики. Приложение 1 Справочное ПРИМЕРЫ НОМИНАЛЬНЫХ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
Линейная зависимость
характеристики значениям значения выходного сигнала (Измененная редакция, Изм. N 1). Приложение 2 Справочное СООТНОШЕНИЕ МЕЖДУ ПОГРЕШНОСТЯМИ, ВЫРАЖЕННЫМИ РАЗЛИЧНЫМИ СПОСОБАМИ ───────────┬────────┬───────────────────────────────────────────────────────────────────────────────────────── Номинальная│Основной│ Значения погрешностей, выраженных статическая│способ ├───────────────┬───────────────┬────────────────────┬───────────────┬──────────────────── характе- │нормиро-│ в процентах │ в процентах │ в процентах │ в единицах │в единицах измерения ристика │вания │ диапазона │ верхнего │диапазона изменения │ измеряемой │ выходного сигнала │ │ измерения │ предела │ выходного сигнала │ величины │ │ │ │ измерения │ │ │ ───────────┼────────┼───────────────┼───────────────┼────────────────────┼───────────────┼──────────────────── y - y = │в про- │ │ │x - x ││ │ │x - x ││ │y - y │ н │центах │ │ │ в 0││ │ │ в 0││ │ в н│ │диапазо-│ гамма │гамма │-------││ гамма │гамма │-------││ гамма │-------│ = k(x - x )│на изме-│ д │ д│ x ││ д │ д│ 100 ││ д│ 100 │ 0 │рения │ │ │ в ││ │ │ ││ │ │ ├────────┼───────────────┼───────────────┼────────────────────┼───────────────┼──────────────────── │в про- │ │ x ││ │ │ x │ │ │ x │ │ │x (y - y ) │ │центах │ │ в ││ │ │ в │ │ │ в│ │ │ в в н │ │верхнего│гамма │-------││ гамма │ гамма │-------│ │ гамма │---│ │гамма │------------│ │предела │ в│x - x ││ в │ в│x - x │ │ в│100│ │ в│100(x - x )│ │измере- │ │ в 0││ │ │ в 0│ │ │ │ │ │ в 0 │ │ния │ │ │ │ │ Примечание.
Остальные обозначения по п. 1.11 и
справочному Приложению 1. (Измененная редакция, Изм. N 1). Приложение 3 Справочное ВИДЫ ХАРАКТЕРИСТИК ПРЕОБРАЗОВАНИЯ
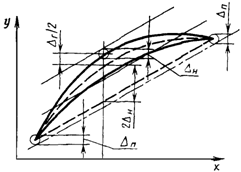
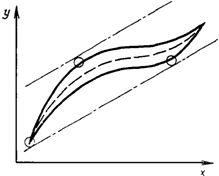
Отклонение действительной характеристики
преобразования
Черт. 1
Черт. 2
Черт. 3 (Измененная редакция, Изм. N 1). Приложение 4 Справочное ПОЯСНЕНИЯ ТЕРМИНОВ, ИСПОЛЬЗОВАННЫХ В НАСТОЯЩЕМ
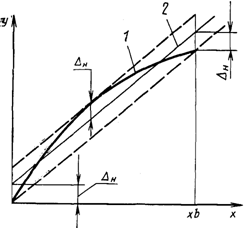
СТАНДАРТЕ ────────────────────────┬────────────────────────────────────────────────── Термин │ Пояснение ────────────────────────┼────────────────────────────────────────────────── Время установления │ Время, прошедшее с момента скачкообразного выходного сигнала │изменения измеряемого параметра до момента, когда │выходной сигнал датчика окончательно войдет в зону │установившегося состояния, составляющую +/- 5% │изменения выходного сигнала, соответствующего │скачку измеряемого параметра Максимальное отклонение│ Отношение наибольшего изменения выходного сигнала выходного сигнала │датчика, зафиксированного во время переходного │процесса при скачкообразном изменении входного │значения, к изменению выходного сигнала от его │начального значения до установившегося состояния Технологическая │ Технологическая операция для выявления и приработка │устранения отказов Приложение 5 Справочное ПРИМЕРЫ НАХОЖДЕНИЯ ЗНАЧЕНИЙ Нахождение значения
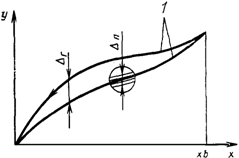
1 - кривая средних значений выходного сигнала; 2 - прямая, минимизирующая значение наибольшего отклонения; Черт. 1 Нахождение значений
1 - кривые средних значений выходного сигнала для
всех направлений изменения входного сигнала; разность между средними значениями выходного
сигнала;
сигнала при одном направлении изменения входного
сигнала Черт. 2 (Измененная редакция, Изм. N 1). Приложение 6 Справочное ОПРЕДЕЛЕНИЕ ЗНАЧЕНИЙ При определении погрешности нелинейности Расчетные значения входной величины
где i принимает значения 0,1, ..., m;
Для каждого значения входной величины Для каждого значения
где n - число проверок. Погрешность нелинейности для каждого
значения
где
Из полученных значений Погрешность нелинейности датчика
при
при
если значения погрешностей Приведенную погрешность нелинейности
датчика
Вариацию выходного сигнала для каждого
значения
За вариацию выходного сигнала датчика
принимается наибольшее из полученных значений Приведенное значение вариации выходного
сигнала датчика
Повторяемость выходного сигнала
определяют для каждого значения
где Повторяемость выходного сигнала датчика
где
В этом случае повторяемость выходного
сигнала определяют по формулам
где Допускается определять повторяемость
выходного сигнала как наибольшее из значений Приведенное значение повторяемости
выходного сигнала датчика
Наибольшее отклонение действительной
характеристики преобразования (Введено дополнительно, Изм. N 1). |